PC版マニュアル
目次
- 1. ログイン
- 2. ホーム画面
- 3. 基本操作
- 4. 機能
1. ログイン
1.1. ログイン方法
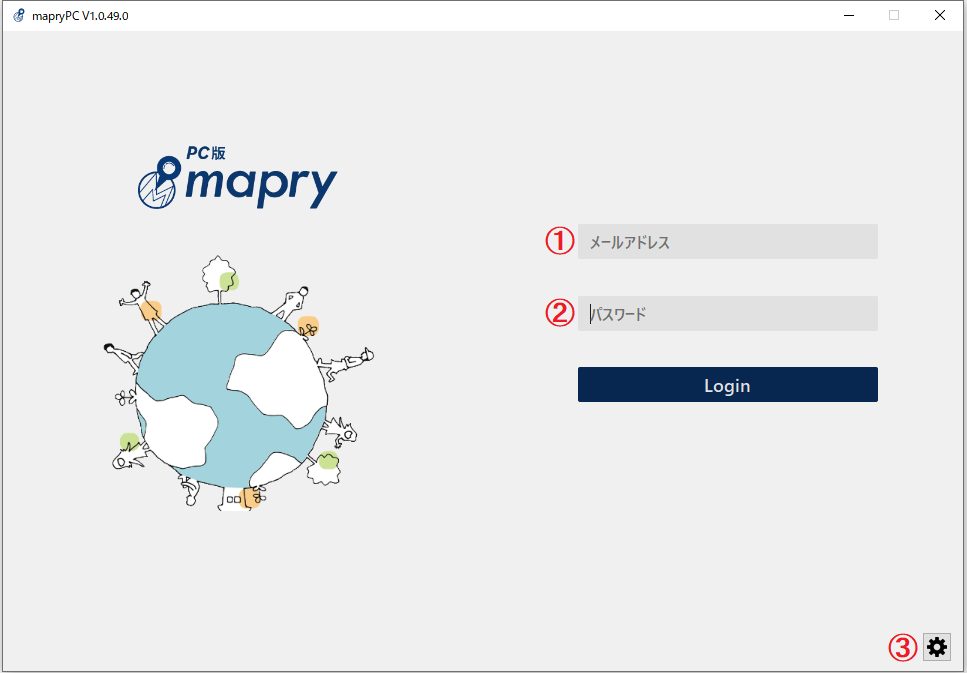
mapry PC版を起動すると、ログイン画面が表示されます。
mapry PC版が有効化されたmapryアカウントのメールアドレスを①、パスワードを②に入力してください。
〇ログインできない、もしくはmapryにメールアドレス以外で登録している場合
恐れ入りますが、下記連絡先にご連絡いただけますと幸いです。
TEL:0795-86-7515
E-mail:support@mapry.co.jp
1.2. プロキシサーバー設定
1.③のボタンを押すと、プロキシサーバー設定画面が表示されます。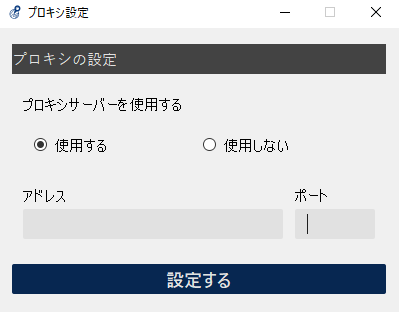
2.”プロキシサーバーを使用する”を選択。
3.使用するプロキシサーバーの、アドレスとポートを入力後、設定するボタンを押すと、プロキシサーバーの設定が適用されます。
設定後は、ログイン画面でメールアドレスとパスワードを入力してログインしてください。
※”接続エラーです。ネットワークの設定をご確認ください。”というエラーが出る場合は、設定したプロキシサーバーの設定が間違っている可能性があります。
4.プロキシサーバーを使用しない場合に戻す場合は、プロキシ設定画面で、”使用しない”を選択後、設定するボタンを押してください。
2. ホーム画面
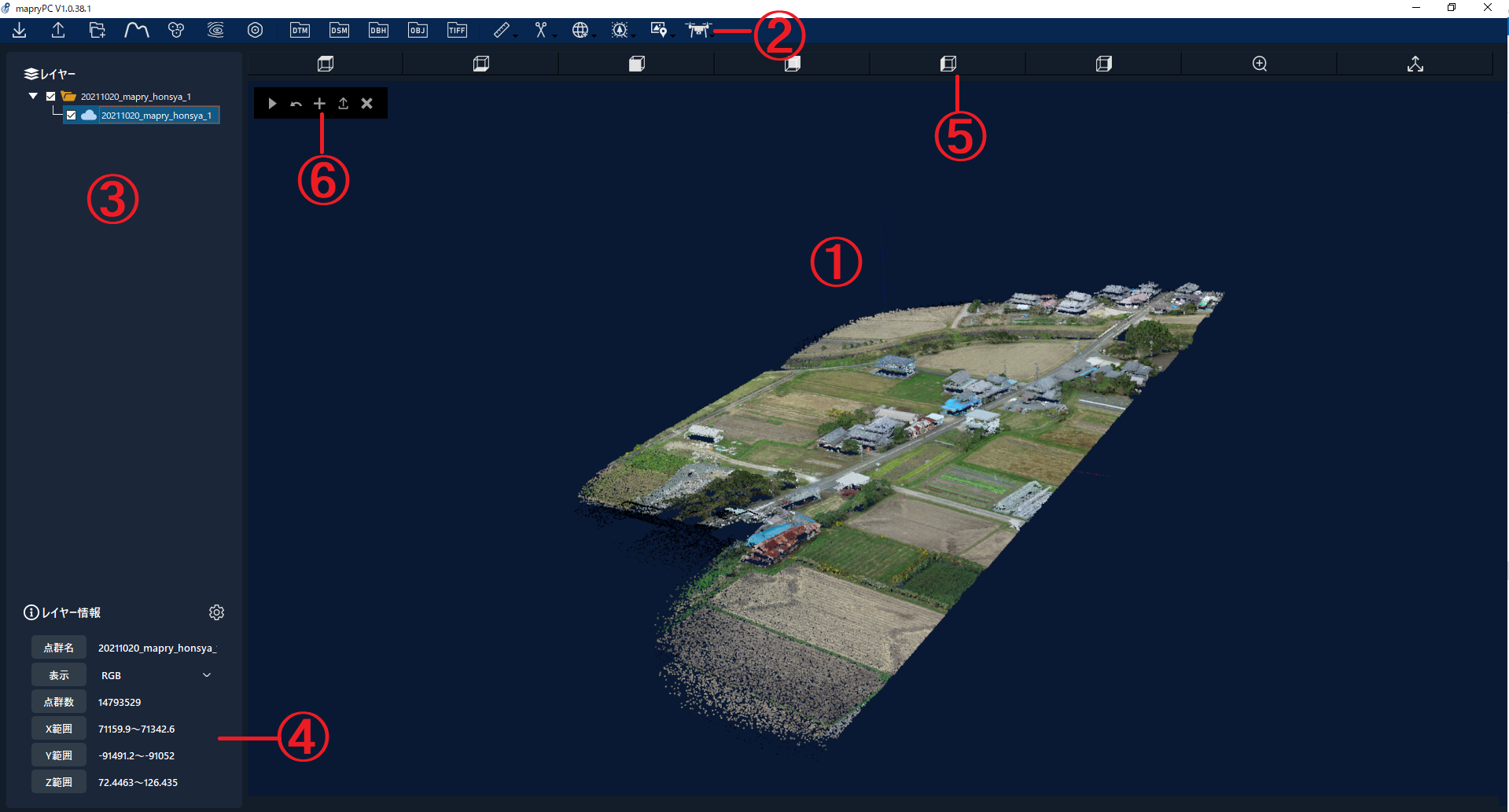
① ビューワー
② ツールバー
③ レイヤー
④ レイヤー情報
⑤ サブツールバー
⑥ ビューツールバー
2.1. ビューワー
LA01、LA03の撮影データや点群等、インポートしたデータが表示されます。
また、一部データをビューワー上にドラッグアンドドロップすることでインポートすることも可能です。詳しくは、基本操作を確認してください。
2.2. ツールバー
各種点群処理のボタン。
詳細は下記の機能で説明する。
① 開く
② 保存
③ 合成
④ 断面図
⑤ 樹頂点検出
⑥ 等高線
⑦ オルソ補正
⑧ DTM作成
⑨ DSM作成
⑩ OBJ作成
⑪ TIFFリサイズ
⑫ CAD機能
⑬ LiDAR-カメラキャリブレーション
⑭ 簡易計測
⑮ 点群カット
⑯ 座標変換
⑰ 立木検出
⑱ マーカーインポート
⑲ レーザードローン
2.3. レイヤー
ファイル名の左にあるチェックボックスでビューワー上の点群をオンオフできます。
ファイル名をクリックして、水色に光っていると、処理の対象となります。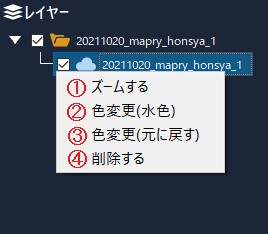
ファイル名の上で右クリックすると、対象のデータに対して以下4メニューが使用できます。
①ズームする 選択した点群にフォーカスした場所にカメラが移動します。
②色変更 点群の色を水色にします。
③色変更(元に戻す) 点群の色を水色から元の色に戻します。
④削除する 点群をレイヤーから削除します。
2.4. レイヤー情報
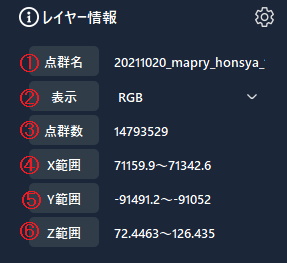
選択した点群の情報が表示されます。
①点群名
②セレクトボタンを選択することで、表示をRGBベースと反射強度ベースに変更できます。(反射強度は保持しているデータに限ります)
③点群数
④X座標の範囲
④Y座標の範囲
⑤Z座標の範囲
2.5. カメラボタン

①~⑥それぞれのアイコン通りの視点にカメラを移動する
⑦ズームボタン カメラの中心にズームします。 ⑧軸表示切替
2.6. ビューツール
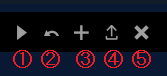
①開始ボタン 一部機能の処理の開始に使用します
②戻るボタン 一部機能で処理を戻る時に使用します
③追加ボタン
④エクスポートボタン 解析結果をエクスポートする時に使用します
⑤終了ボタン 一部機能を終了する時に使用します
3. 基本操作
3.1. LA01、LA03撮影データのインポート
3.1.1 ドラックアンドドロップでインポートする場合
LA01、LA03で撮影した時に作成されたフォルダを、ビューワーにドラックアンドドロップすると、点群を含む撮影したデータを一通りインポートできます。
※mapryPC版を管理者権限で実行した場合、ドラッグアンドドロップで、ファイルをインポートできない場合があります。
その場合は、エクスプローラーからフォルダを選択してインストールする場合の方法でインストールしてください。
3.1.1 エクスプローラーからフォルダを選択してインストールする場合
ツールバー左端の、インポートマークをクリックして、フォルダの読み込み(LA01/LA03)をクリック後、インポートするフォルダを選択してください。 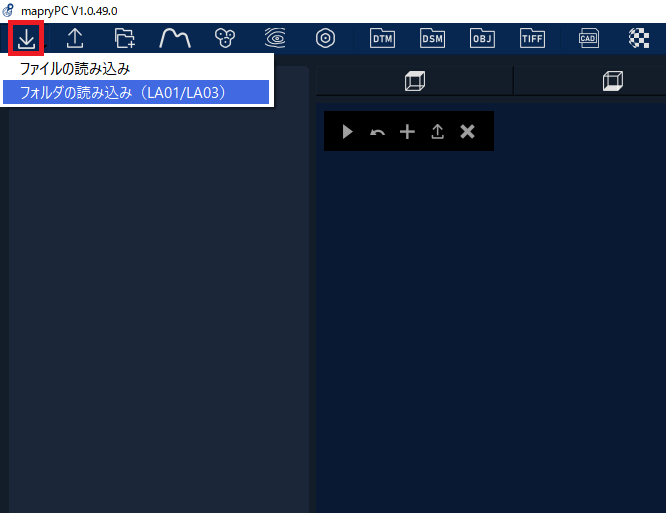
3.2.1 LA01データ
ドラックアンドドロップまたはエクスプローラーからインポートした際、「点群読み込み中…」と表示されます。
読み込みが完了すると、「点群の補正を行いますか?」と表示されます。
こちらの補正は、マーカーのGNSS座標を用いてIMU座標のズレを補正という内容です。
IMUは、計測開始地点からの相対座標となっているため、一度ズレは生じてしまうと計測終了時までズレを蓄積し続けてしまうというデメリットがあります。この問題を解決するために、絶対座標であるGNSSを用いてズレをリセットする処理が必要になります。
補正にはマーカーを使用しているため、計測中にマーカーを多く設置するほど補正の精度は向上します。
参考サイト:https://mogist.kkc.co.jp/word/8cd9ef04-1495-44ea-bd98-f59b84f036ad.html
ただ稀に、計測機器の不具合により対応するGNSSとIMUの座標がズレてしまう事があり、点群がドリフトしている様な状態になる事があります。その場合、「いいえ」をクリックし、補正を行わないで下さい。
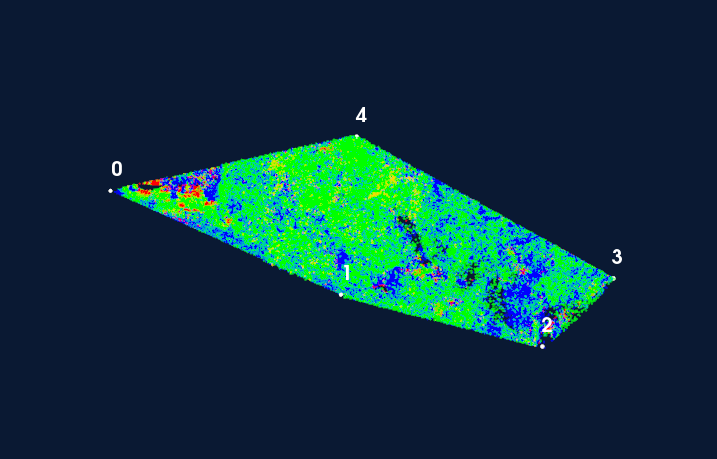
3.2.1.1 マーカー
レイヤー上に”マーカー”が追加され、撮影中に設置したマーカーが表示されます。
Shiftキーを押しながらマーカーを左クリックすると、撮影した画像が別ウィンドウで表示されます。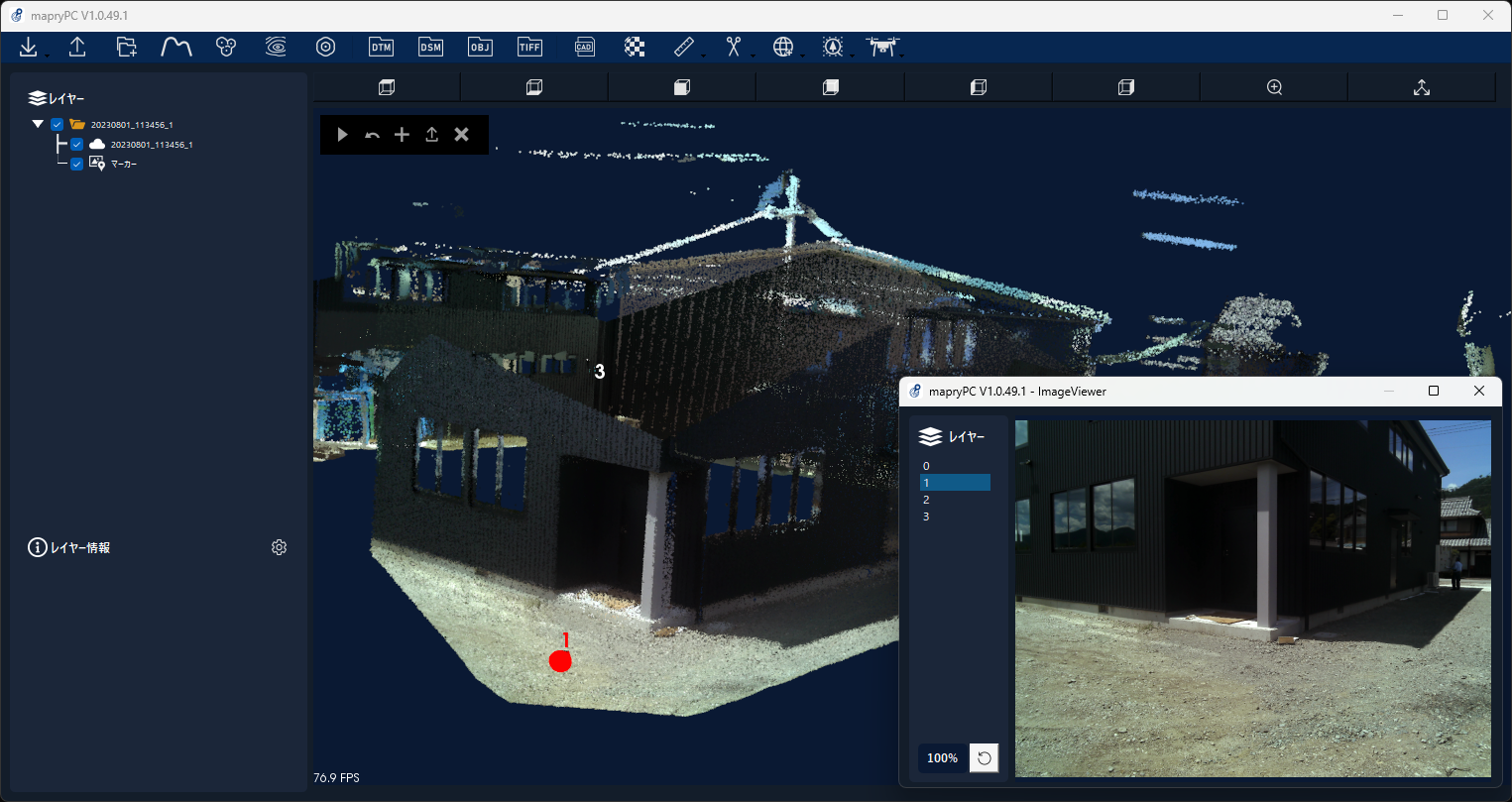
3.2.2 LA03データ
3.2.2.1 撮影ルート
レイヤー上に”撮影ルート”が追加され、LA03を撮影する際に通った経路が、ビューワー上に赤いラインで撮影ルートが表示されます。 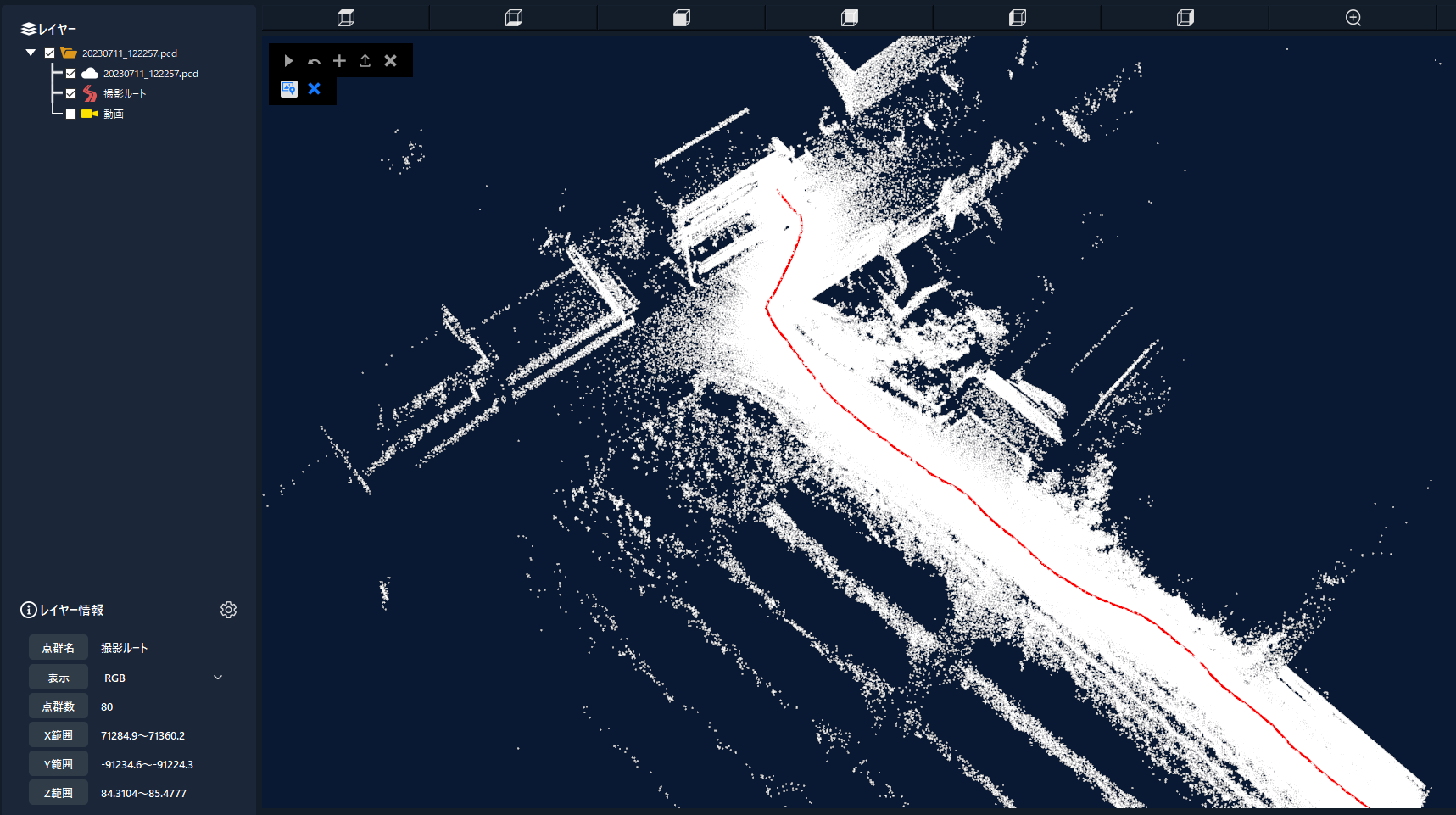
3.2.2.2 動画
レイヤー上に”動画”が追加され、撮影した動画が別ウィンドウで表示され
再生している時間の座標が、ビューワー上に青いマーカーで表示されます。
メディアプレイヤーの機能を説明します。
①再生ボタン 動画の再生が始まります。
②一時停止ボタン 動画の再生が一時ストップします。
③再生バー バーを動かすことで動画の再生時間を変更できます。
3.2. 点群単体のインポート
ビューワー上に点群をドラックアンドドロップまたは、インポートアイコンからファイルを選択することで点群をインポートできます。
対応拡張子は、PLY、PCD、LAS、TXTです。
※LA01、LA03で撮影した点群を表示する際は、LA01、LA03で撮影データのインポートの方法でインポートしてください。
単体でインポートした点群は補正がされておらず、一部機能も使用できません。
4. 機能
4.1. 開く 
点群ファイルを選択して、インポートできます。 対応拡張子は、PLY、PCD、LAS、TXTです。
※ディレクトリでのアップロードはドラックアンドドロップでのみ対応しております。
1.開くアイコンを押します。
2.ファイルダイアログが表示されるので、開きたいファイルのパスを選択すると、点群の読み込みが開始され、点群が表示されます。
4.2. 保存 
4.2.1 点群を保存する
保存先を指定して、点群を保存できます。
対応拡張子は、PLY、PCD、LAS、TXT対応しております。
1.保存したい点群を、レイヤー上でアクティブにした状態で保存アイコンを押します。
2.ファイルダイアログが表示されるので、保存したいパスを選択します。
3.ファイルダイアログ下のファイルの種類を変更することで、保存する拡張子を決定できます。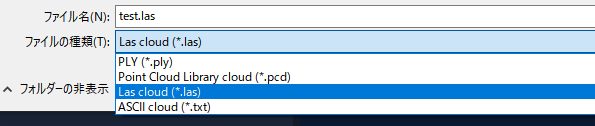
4.ファイルダイアログ右下の”保存”をクリックすると、保存されます。
4.2.2 ライン、ポリゴンを保存する
1.保存アイコンを押します。
2.CADデータ出力設定画面が表示されるので、必要な項目を入力します。
①ファイルダイアログが表示されるので保存先を、.dxfで選択してください
②断面図、平面図のどちらで出力するか選択できます。
③DXFのバージョンを選択できます。
④mm、mどちらで出力できるか選択できます。
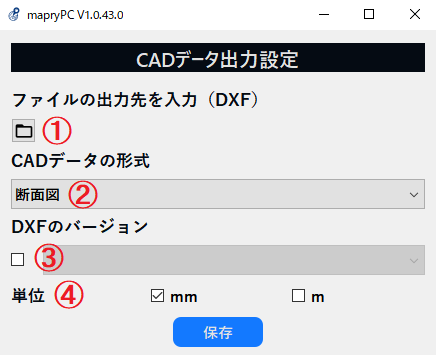
3.必要な項目の入力が完了後、”保存ボタン”を押すと、選択した場所にDXFファイルで保存されます。
4.3. 合成 
インポートした2つの点群を合成する機能です。
合成する際、座標変換の方法としてユークリッド変換、ヘルマート変換、アフィン変換の3つがあります。
-
レイヤーから使用する点群を2つ選択してください。
-
ツールバーから合成のアイコンをクリックしてください。

-
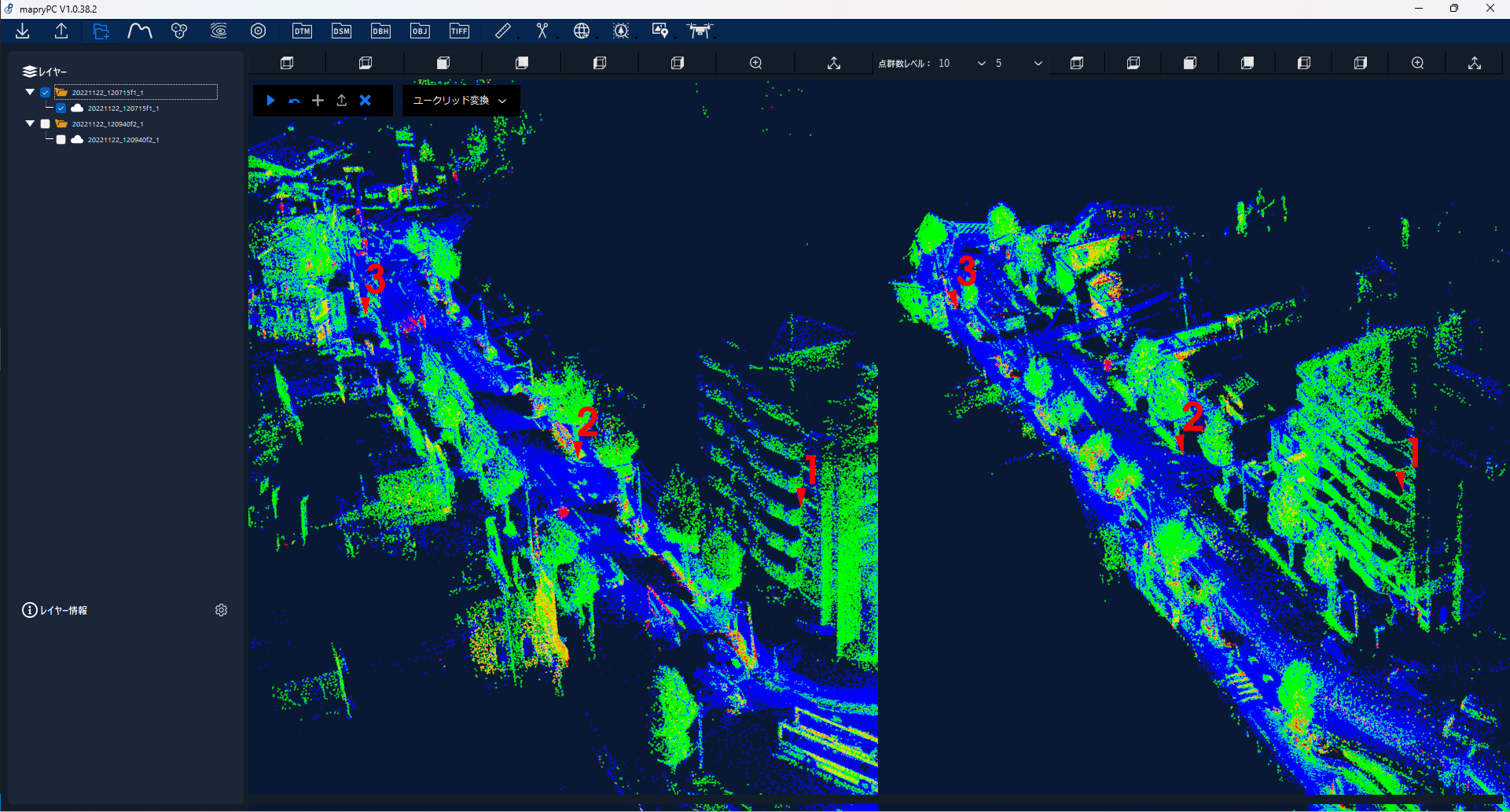
ビューワーが左右2つに分割されます。
右クリックで左右それぞれの点群から3点ずつ対応する点を選択して下さい。(アフィン変換の場合は4点ずつ)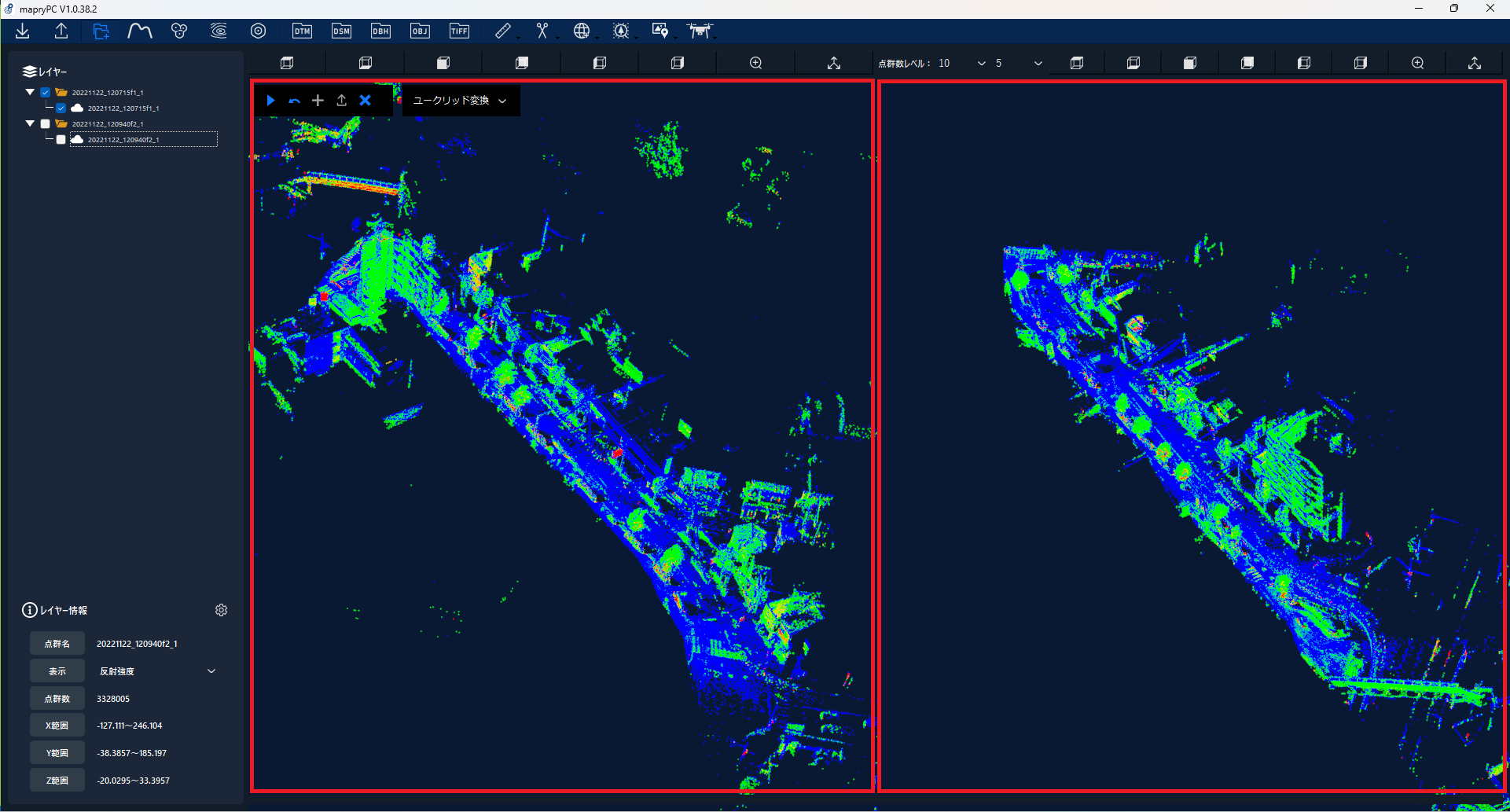
座標変換の方法は、ビューツールの横のメニューから変更ができます。
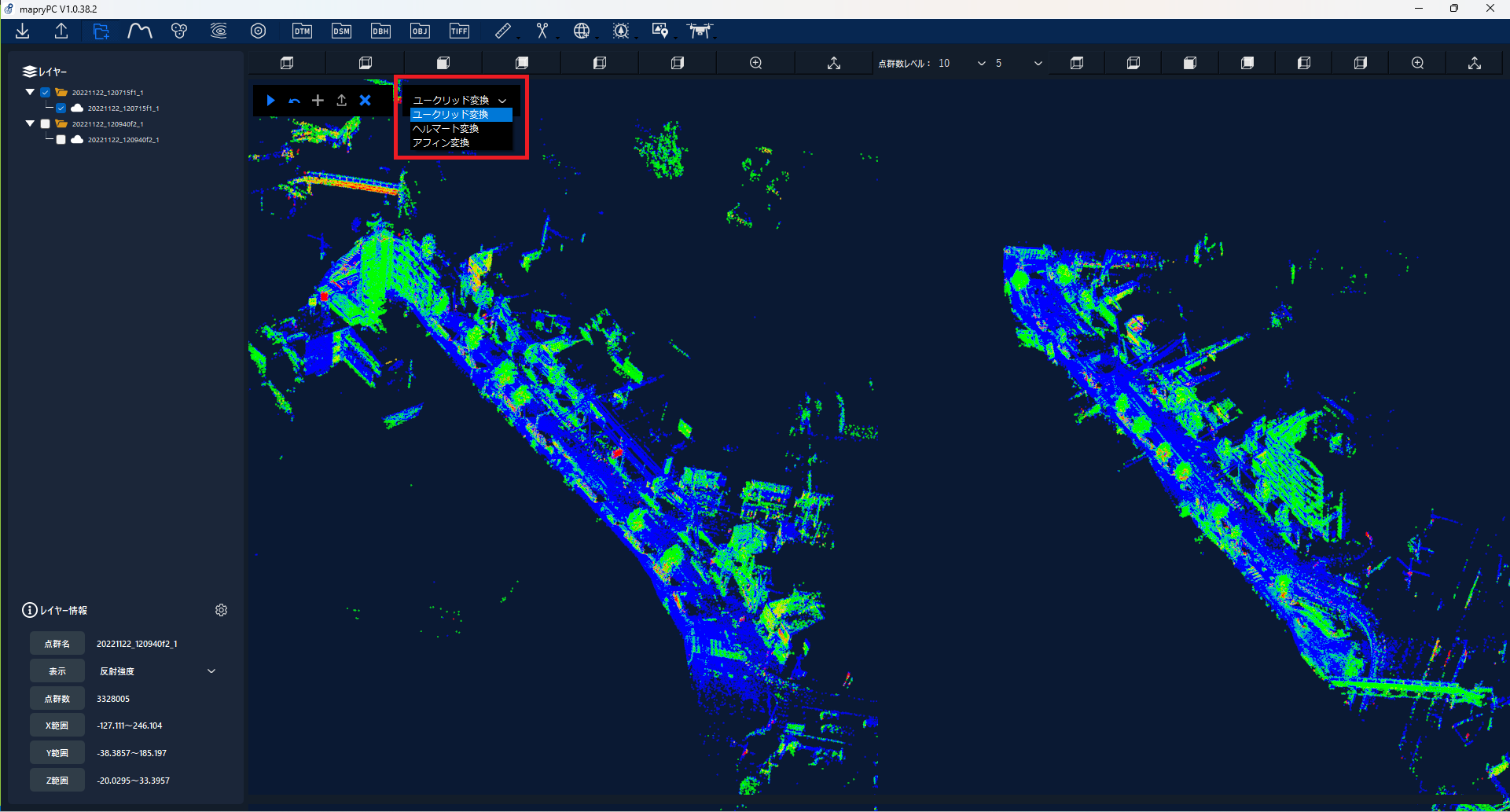
- 対応点の選択後、ビューツールの開始ボタンをクリックしてください。
- 合成結果が新しいウィンドウで表示されます。
①自動位置合わせ(ICPアルゴリズム):合成の微調整ができます。
②保存する;合成結果を点群ファイルとして保存することができます。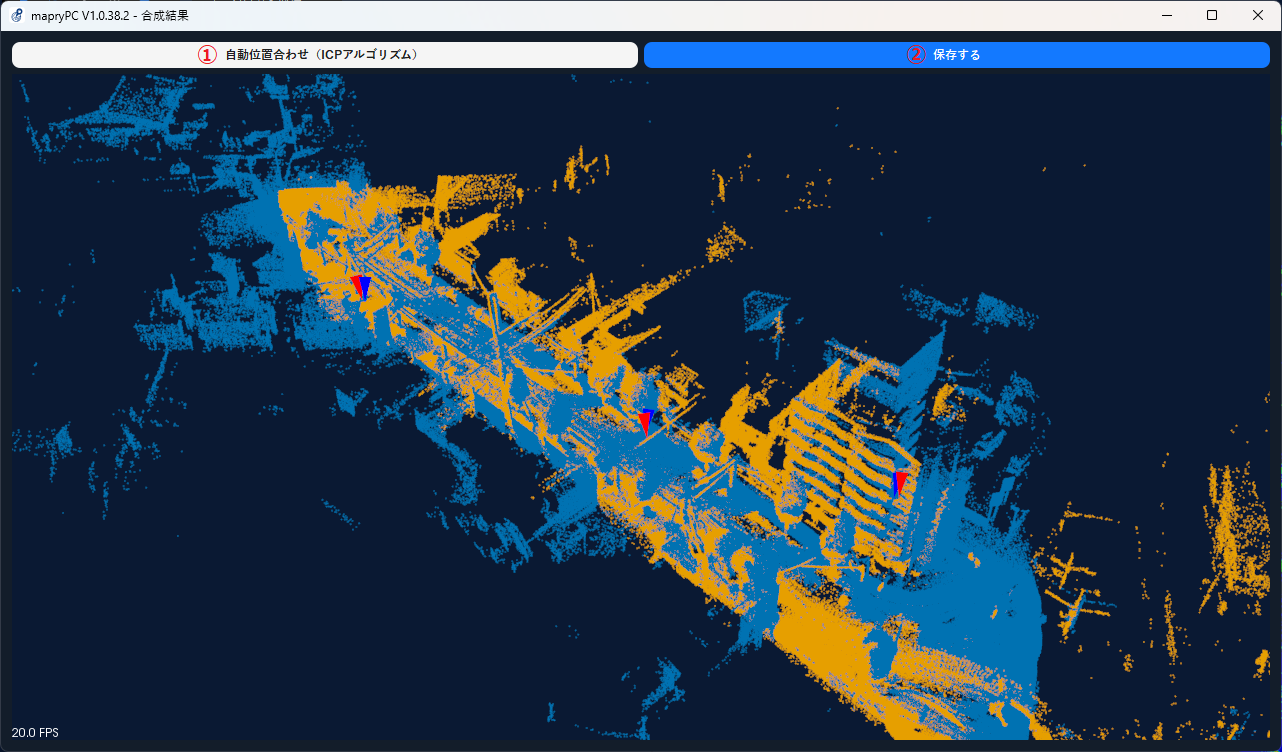
また、合成結果は自動的にレイヤーに追加されます。
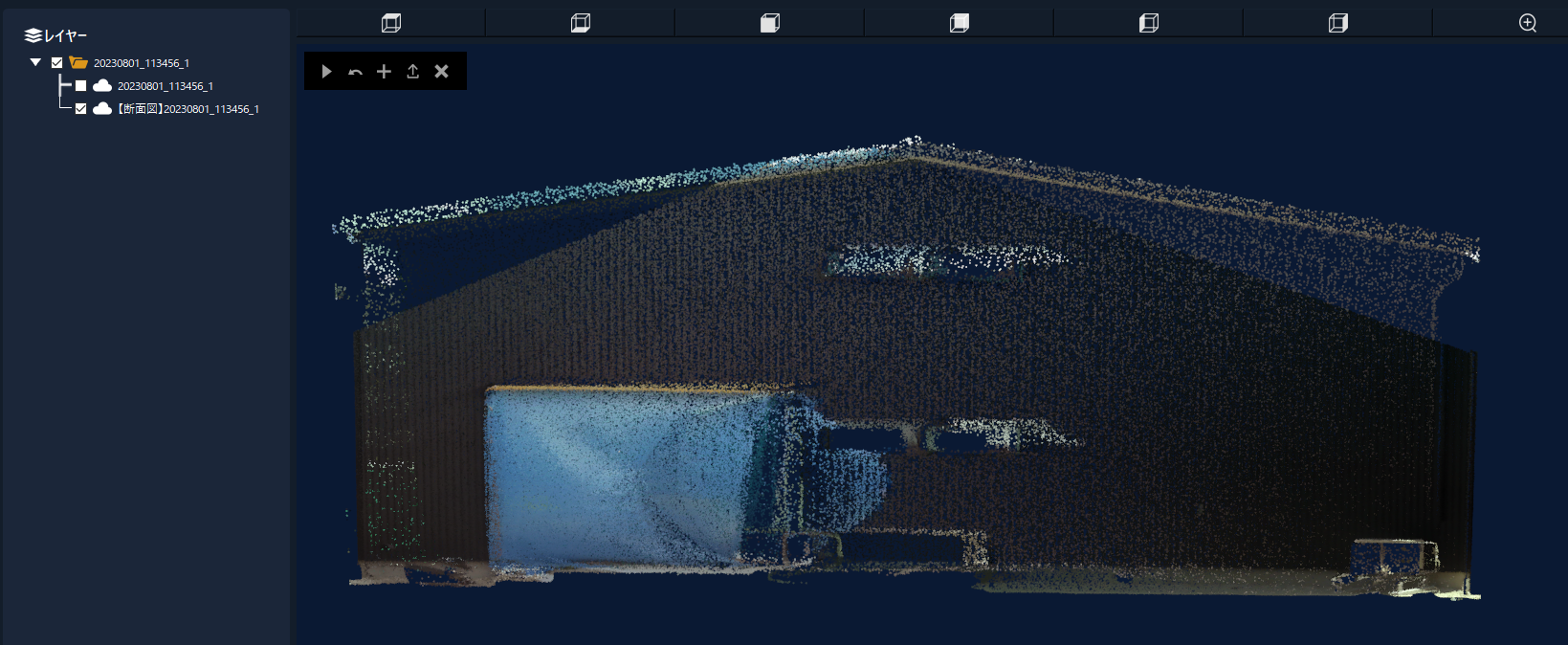
4.4. 断面図 
インポートした点群の断面図を表示する機能です。
-
レイヤーから使用する点群を選択してください。
-
ツールバーから断面図のアイコンをクリックしてください。

- 右クリックで始点と終点となる2点を選択してください。2点選択後、XY平面を横軸、Zの値を縦軸とした2次元の断面図がレイヤーに追加されます。
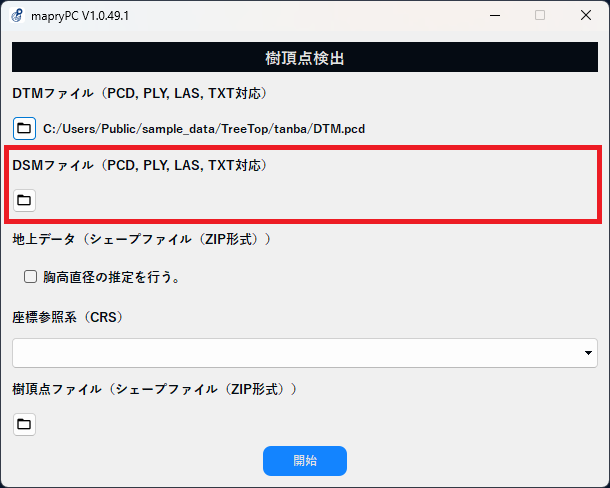
4.5. 樹頂点検出 
レーザードローンで取得した点群から、樹頂点を検出する機能です。
検出した樹木の位置情報、樹高、樹種の算出および胸高直径の推定を行います。
検出結果はシェープファイル(.shp)として出力します。
-
ツールバーから樹頂点検出のアイコンをクリックしてください。

- DTMの点群ファイル(.pcd、.ply、.las、.txt)を選択してください。
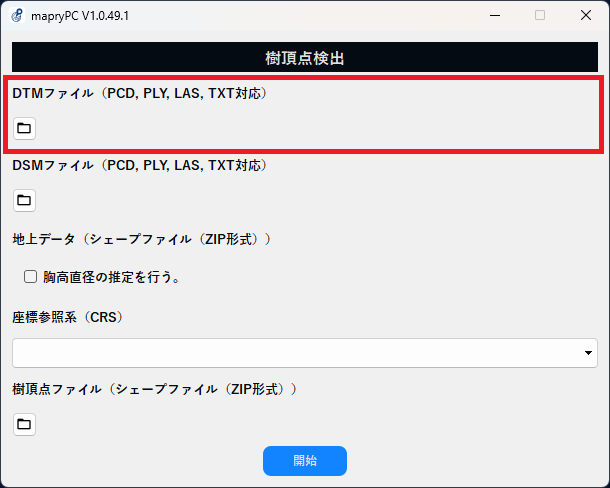
- DSMの点群ファイル(.pcd、.ply、.las、.txt)を選択してください。
- 胸高直径の推定を行う場合は、チェックをした後に地上データを選択してください。
地上データには、立木検出より出力したシェープファイルが選択できます。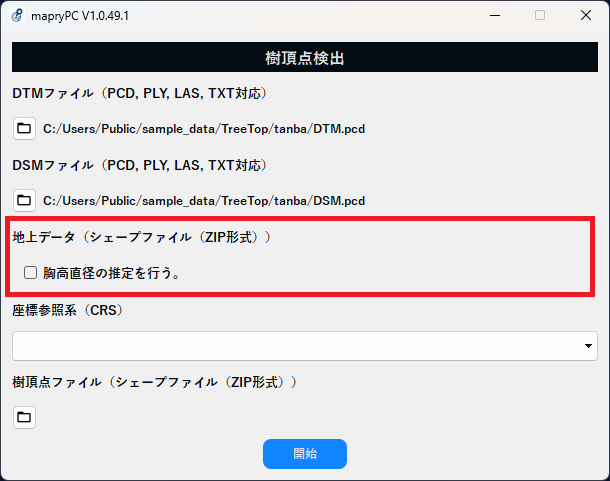
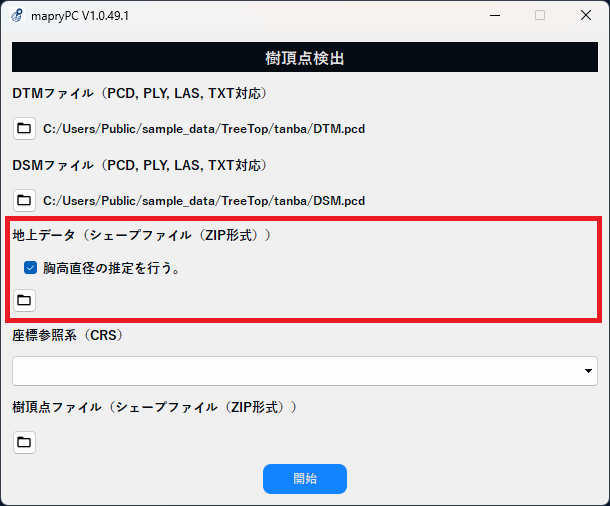
地上データがない場合は、チェックをせず次の項目に進んでください。 - 参照座標系(CRS)を選択してください。
座標系は日本測地系2011の1系(epsg:6669)~19系(epsg:6687)から選択できます。
座標系が分からない場合は、空欄のまま次の項目に進んでください。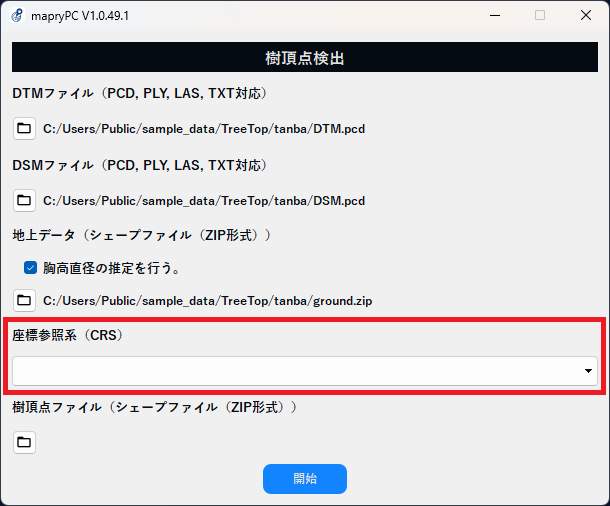
- 樹頂点検出の結果を保存するファイル(.zip)を入力してください。
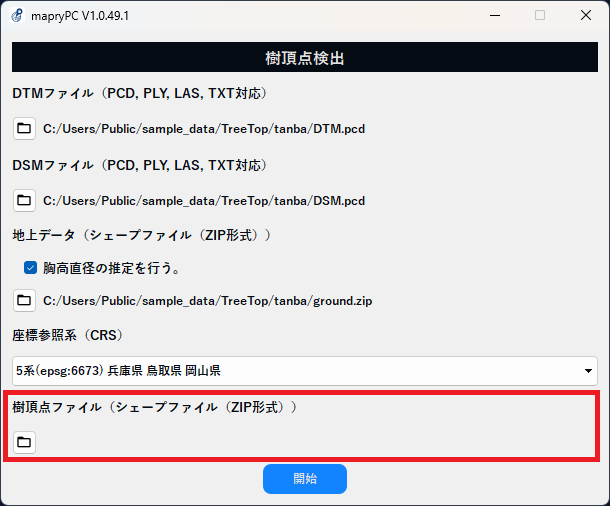
- 各項目の入力後、「開始」ボタンで樹頂点検出の処理が開始します。
※DTMファイルおよびDSMファイルの選択、樹頂点ファイルの入力は必須項目です。
地上データと座標参照系の選択は任意になっていますので、空欄のままでも検出は可能です。
4.6. 等高線 
等高線のベクターデータを作成。
DTMを用いて、設定した高さを元に一定の間隔でラインのデータを算出し、シェープファイル(.shp)をして出力する。
-
ツールバーから等高線のアイコンをクリックしてください。

- DTMの点群ファイル(.pcd、.ply、.las、.txt)を選択してください。
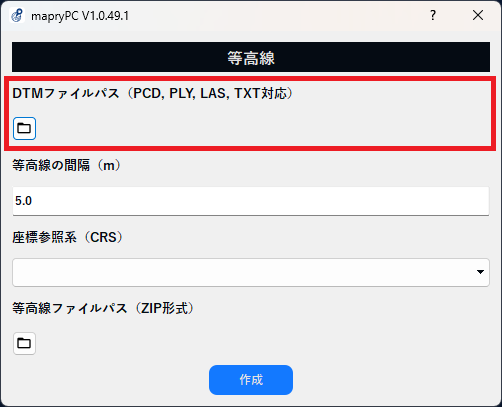
- 等高線の間隔を入力してください。0.1m単位で数値を入力することができます。
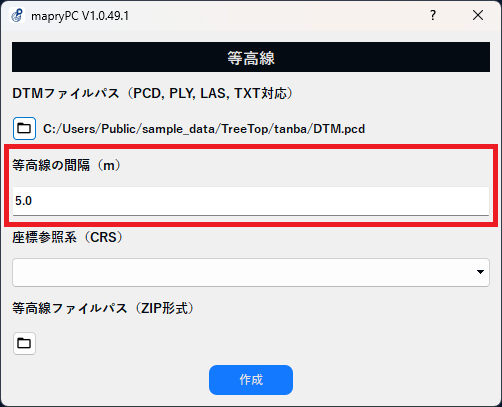
- 参照座標系(CRS)を選択してください。
座標系は日本測地系2011の1系(epsg:6669)~19系(epsg:6687)から選択できます。
座標系が分からない場合は、空欄のまま次の項目に進んでください。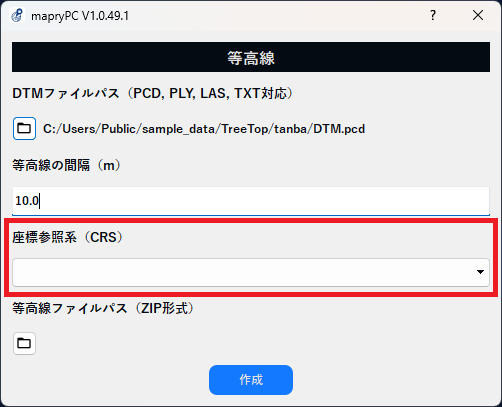
- 等高線の結果を保存するファイル(.zip)を入力してください。
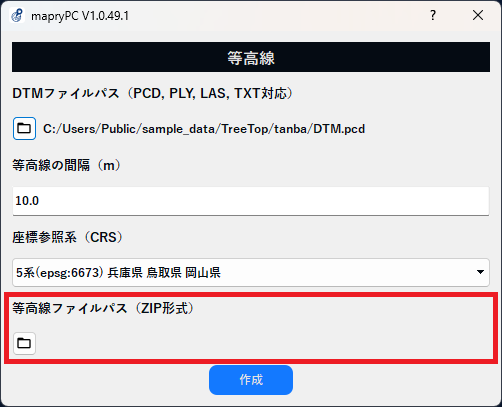
- 各項目の入力後、「作成」ボタンで等高線を作成します。
※座標参照系の選択は任意になっていますので、空欄のままでも等高線の作成は可能です。
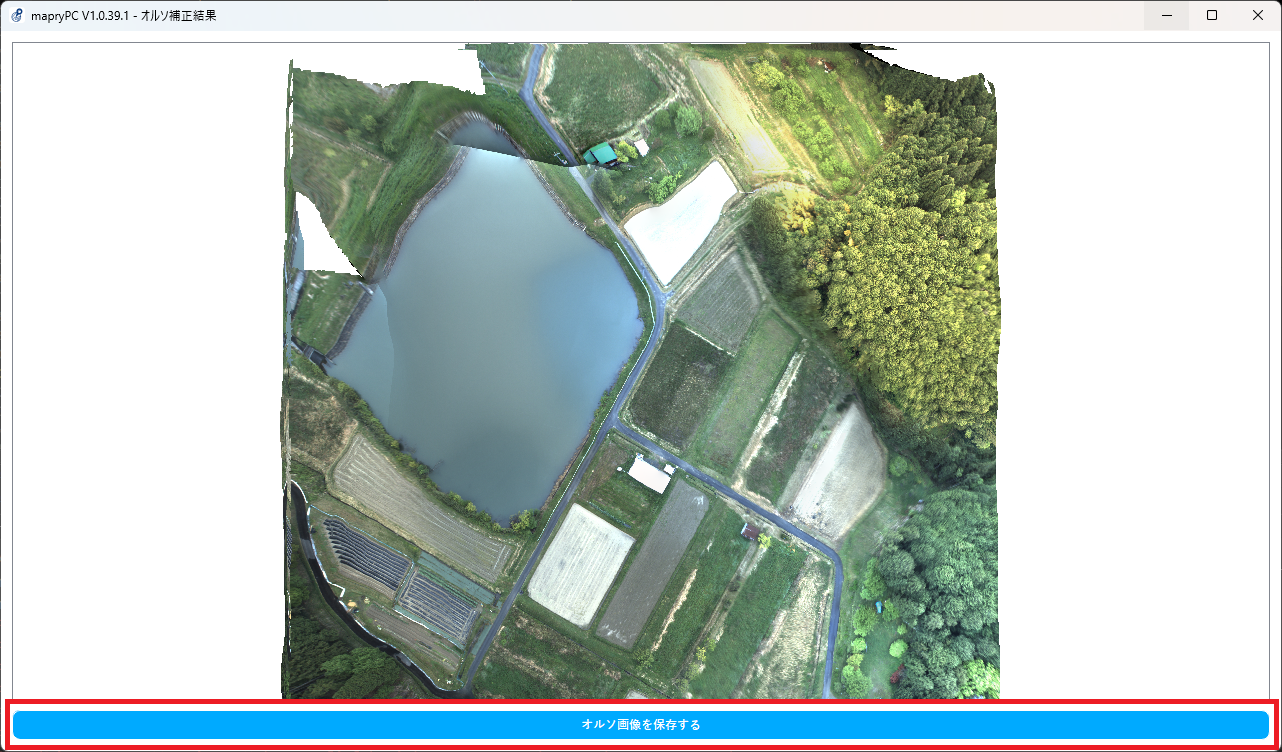
4.7. オルソ補正 
複数の空中写真からオルソ画像を作成する機能です。
- ツールバーからオルソ補正のアイコンをクリックしてください。

- 設定画面から空中写真が保存されているフォルダを選択してください。
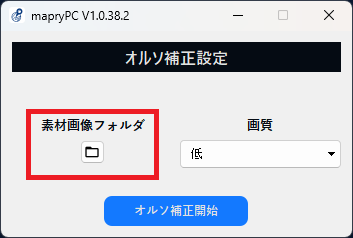
- 設定画面から画質を選択してください。デフォルトでは「低」になっています。
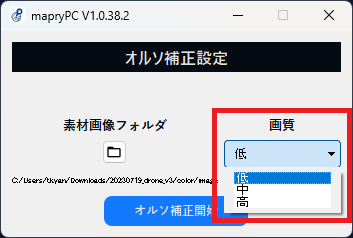
- オルソ補正開始ボタンでクリックしてください。
処理時間の目安として画像が100枚で10分~30分、500毎で1時間~3時間程かかります。
- 処理が完了しますと、オルソ画像が結果として表示されます。
「オルソ画像を保存する」ボタンでTIFF形式(.tif)のオルソ画像を保存できます。
〇注意点
- オーバーラップ率が低い場合や、画像がブレている場合はエラーになる可能性があります。
- 推奨スペックを満たしていない環境においても失敗することがあります。
4.8. DTM作成 
インポートした点群からDTMを作成します。
1.使用する点群をレイヤーから選択してください。
2.DTMのアイコンをクリックしてください。
3.”右クリックを2回押して、地表面を検出する範囲を選択してください”のダイアログのOKボタンを押してください。
4.右クリックで2点選択すると、その2点を頂点として選択された範囲が赤色になります。
・処理範囲を決定する場合は、ビューワー左上のスタートボタンを押してください。
・再度処理範囲を選択する場合は、ビューワー左上の戻るボタンを押してください。
・DTM作成を終了する場合は、ビューワー左上の終了ボタンを押してください。
5.スタートボタンを押した後、DTMメッシュレベル設定が表示されますので
①モード選択(地上、ドローン) ②メッシュ(0.25m、0.5m、1.0m)
①、②を設定してDTM作成開始ボタンを押してください。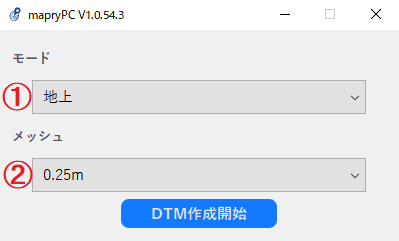
6.DTM作成終了後、同じレイヤーの階層にDTMが追加されます。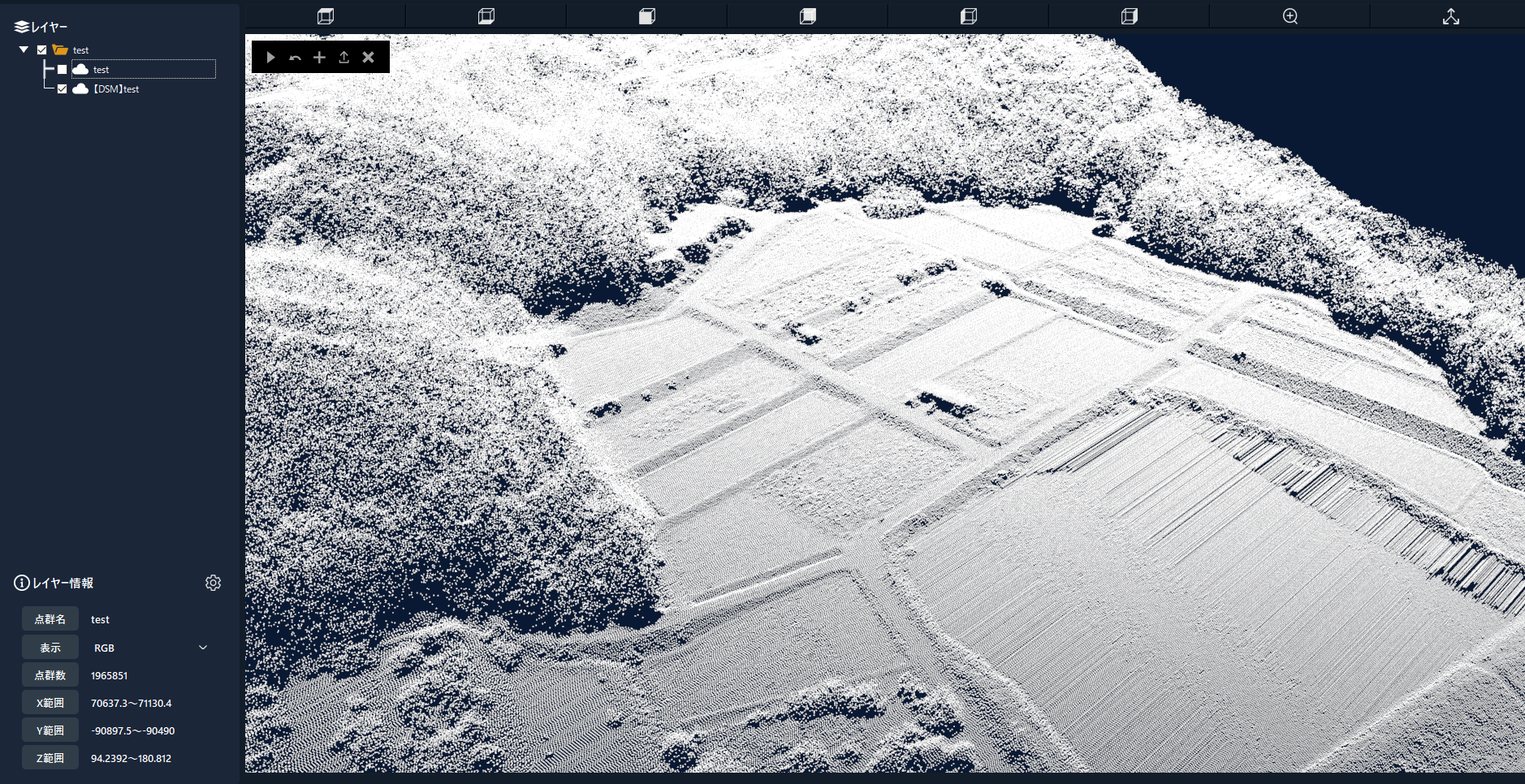
〇注意点
・使用する点群ファイルの容量によっては、DTM作成に時間がかかることがあります。
・作成されるDTMは四角形になるように補間されます。選択した範囲が四角でない場合は、端の一部の範囲が実際の地形と異なるDTMで出力される場合があります。
・作成したDTMに反射強度はありません。
4.9. DSM作成 
インポートした点群からDSMを作成します。
1.使用する点群をレイヤーから選択してください。
2.DSMのアイコンをクリックしてください。
3.”右クリックを2回押して、DSMを作成する範囲を選択してください”のダイアログのOKボタンを押してください。
4.右クリックで2点選択すると、その2点を頂点として選択された範囲が赤色になります。
・処理範囲を決定する場合は、ビューワー左上のスタートボタンを押してください。
・再度処理範囲を選択する場合は、ビューワー左上の戻るボタンを押してください。
・DSM作成を終了する場合は、ビューワー左上の終了ボタンを押してください。
5.スタートボタンを押した後、DTMメッシュレベル設定が表示されますので
DSMメッシュレベルで作成するDTMのメッシュレベルを0.25m、0.5m、1.0mから選択して、DSM作成開始ボタンを押してください。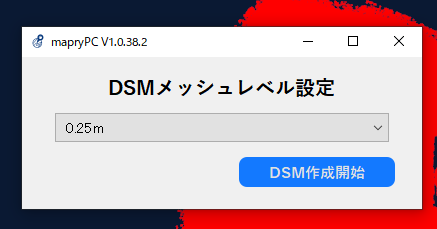
6.DSM作成終了後、同じレイヤーの階層にDSMが追加されます。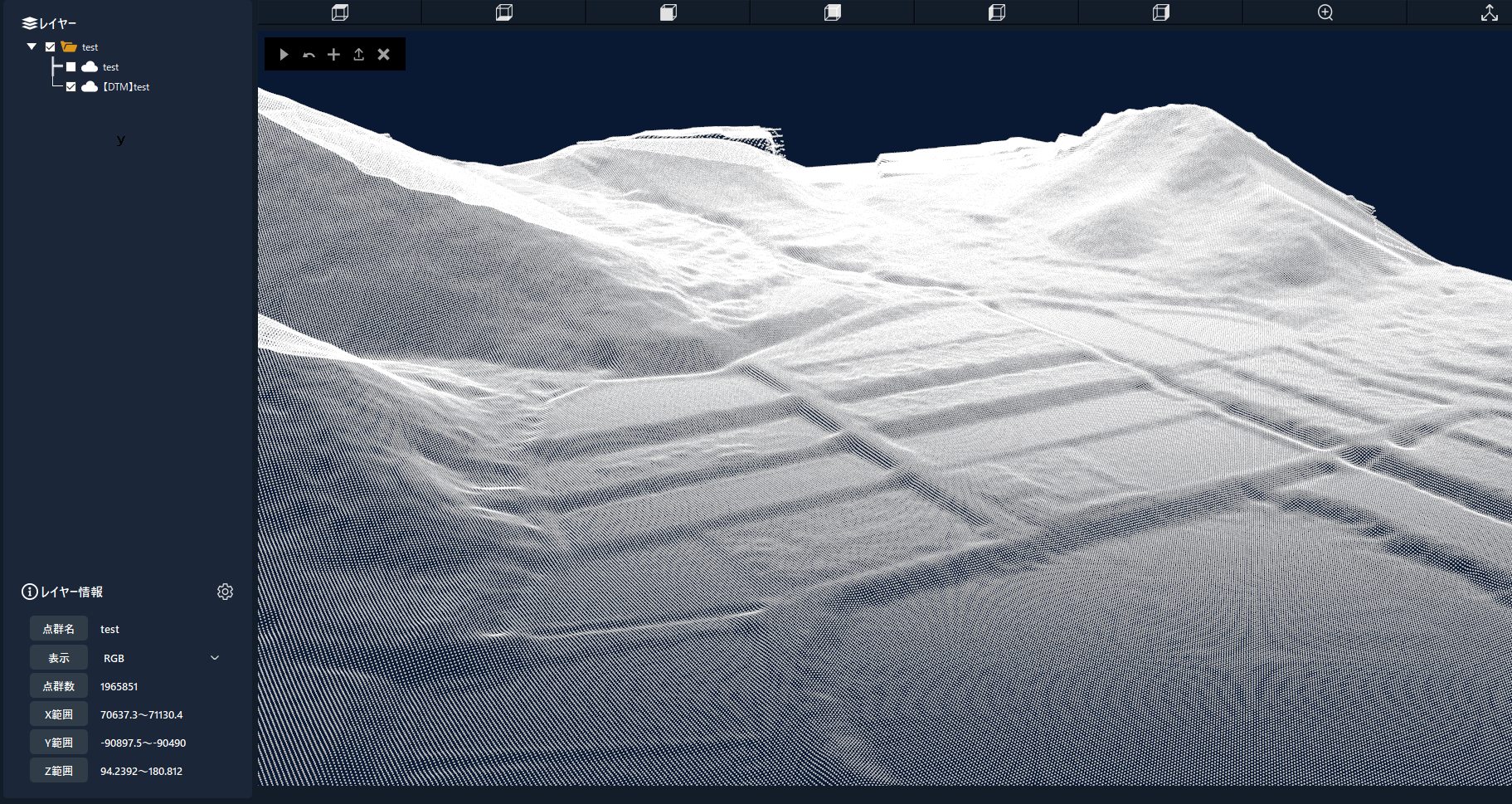
〇注意点
・使用する点群ファイルの容量によっては、DSM作成に時間がかかることがあります。
・作成したDSMに反射強度はありません。
4.10. OBJ作成 
※準備中です。
4.11. TIFFリサイズ 
※準備中です。
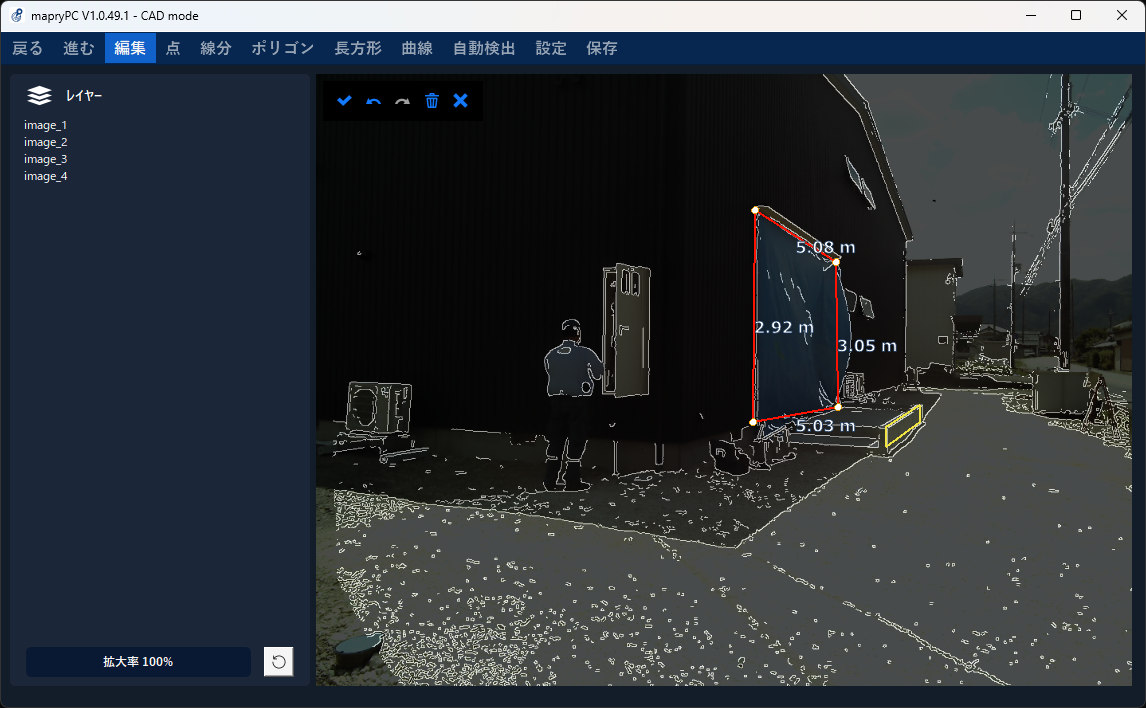
4.12 CAD機能
LA01(固定色付け)で取得したデータを使用したCAD機能です。
撮影した画像からエッジを検出し、点群の3次元座標を付与したCADデータを作成します。
-
レイヤーから使用する点群を1つ選択してください。
-
ツールバーからマーカーインポートのアイコンをクリックしてください。次に、「CAD機能」をクリックしてください。

- CAD機能の画面が新しいウィンドウで表示されます。
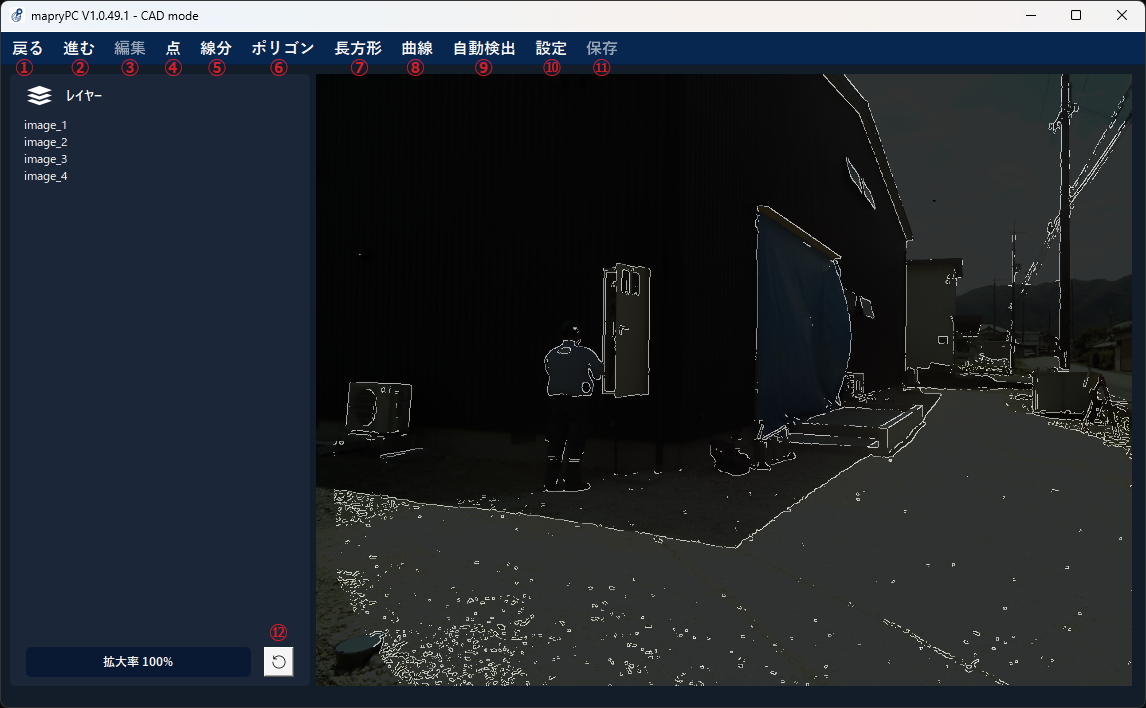
- 基本操作
左クリックで各図形の頂点を設置します。
左クリックを長押ししながらマウスを動かすと、画像の移動ができます。
右クリックで線分、ポリゴン、曲線などの頂点が複数ある図形の描画を確定します。
マウスホイールで画像の拡大・縮小の操作ができます。
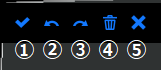
4.12.1 戻る
直前の操作を取り消して元に戻します。
4.12.2 進む
直前に取り消した操作をもう一度やり直します。
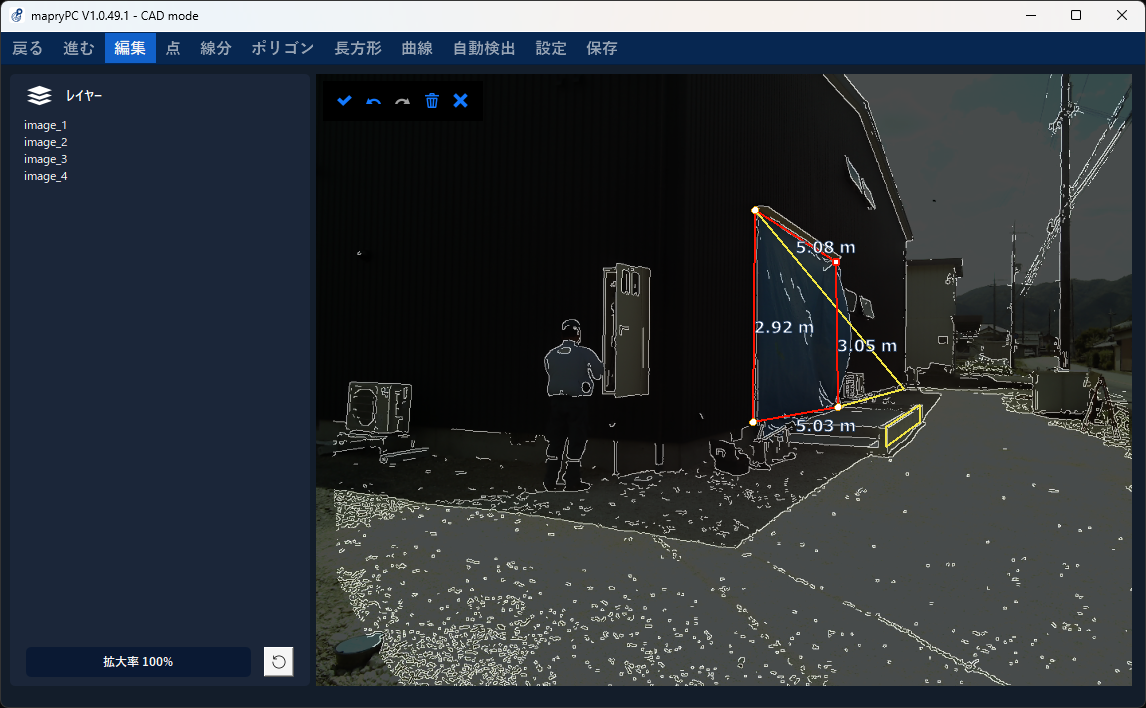
4.12.3 編集
描画した図形の編集をします。
- 基本操作
-
左クリックで範囲選択を行ってください。
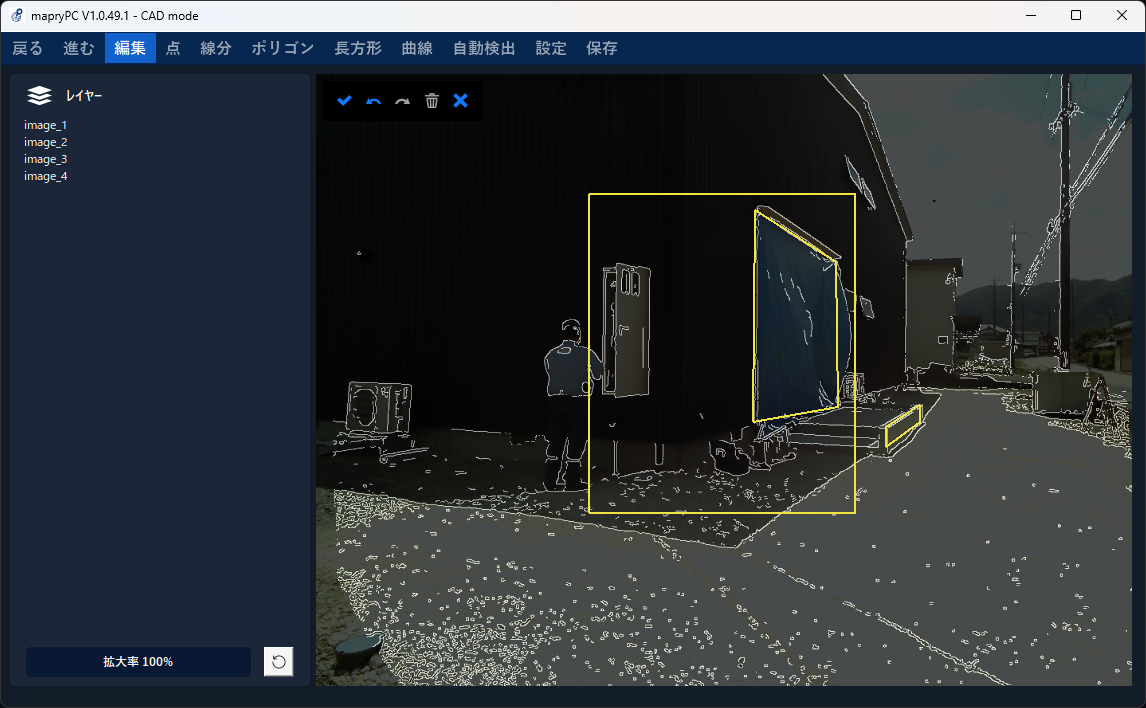
-
範囲内に図形の頂点がある場合は、編集可能な図形が赤色に変わり頂点が表示されます。
-
右クリックで図形の頂点を移動することができます。
-
- コントロールパネル
- 決定:編集結果を決定します。
- 戻る:直前の編集操作を取り消して元に戻します。
- 進む:直前に取り消した操作をもう一度やり直します。
- 削除:選択した図形を削除します。
- 中止:編集結果を破棄して、編集操作を中止します。
4.12.4 点
右クリックした位置に点を作成します。
4.12.5 線分
右クリックした位置を頂点とする線分を作成します。 2回以上クリックすると各頂点を結ぶ線分を描画します。
4.12.6 ポリゴン
右クリックした位置を頂点とするポリゴンを作成します。 3回以上クリックすると各頂点を結ぶポリゴンを描画します。
4.12.7 長方形
右クリックした位置を頂点とする長方形を作成します。 2回以上クリックすると長方形を描画します。
4.12.8 曲線
右クリックした位置を制御点とする曲線(ベジェ曲線)を作成します。 3回以上クリックすると制御点に従ってベジェ曲線を描画します。
4.12.9 自動検出
エッジ画像から自動的に線分を検出および作成をします。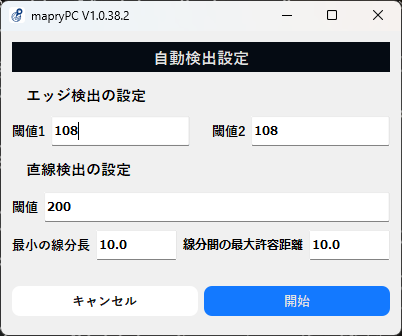
- エッジ検出の設定
閾値1:閾値2の値により検出したエッジを元にして、エッジ周辺のピクセルにて輝度の差が閾値1より大きい場合はエッジとして検出されます。
閾値2:隣接するピクセルの輝度の差が、閾値2より大きい場合はエッジとして検出されます。 - 直線検出の設定
閾値:隣接するピクセルの輝度の差が、閾値より大きい場合は線分として検出されます。
最小の線分長:検出した線分の内、指定した値よりも短い線分は除外されます。
線分間の最大許容距離:検出した線分の内、隣接する線分間の距離が指定した値より小さい場合は、1本の直線として検出されます。
4.12.10 設定
エッジ検出の閾値や画像の透明度を変更することができます。
エッジ検出にはCanny法を用いています。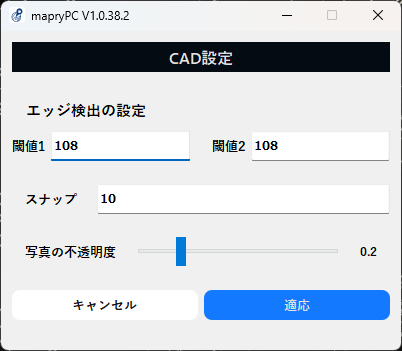
- エッジ検出の設定
閾値1:閾値2の値により検出したエッジを元にして、エッジ周辺のピクセルにて輝度の差が閾値1より大きい場合はエッジとして検出されます。
閾値2:隣接するピクセルの輝度の差が、閾値2より大きい場合はエッジとして検出されます。 - スナップ:スナップレベルを指定することができます。
- 写真の不透明度:背景画像の不透明度を設定することができます。
4.12.11 保存
描画した図形をDXFファイル(.dxf)に保存します。
各項目を入力した後、「保存」ボタンをクリックするとファイルの保存ができます。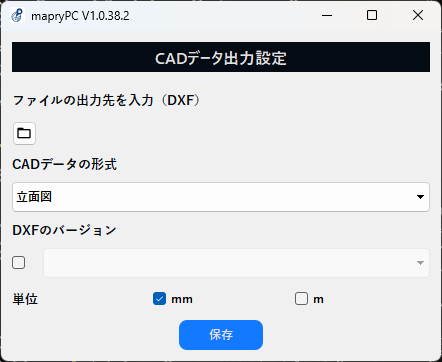
- ファイルの保存先を入力(DXF):保存するファイルパスの設定をしてください
- CADデータ形式:「立面図」または「平面図」を選択してください。
- DXFのバージョン:DXFのバージョンを指定できます。指定する場合は、「R12/R2000/R2004/R2007/R2000/R2013/R2018」から選択してください。
4.12.12 拡大率リセット
拡大率を1に戻します。
また画像の位置も初期の状態に戻します。
4.13 LiDAR-カメラキャリブレーション
LiDARとカメラのキャリブレーションを実施する機能です。
補正後の内部パラメータと外部パラメータを出力します。
-
ツールバーからマーカーインポートのアイコンをクリックしてください。次に、「カメラキャリブレーション」をクリックしてください。

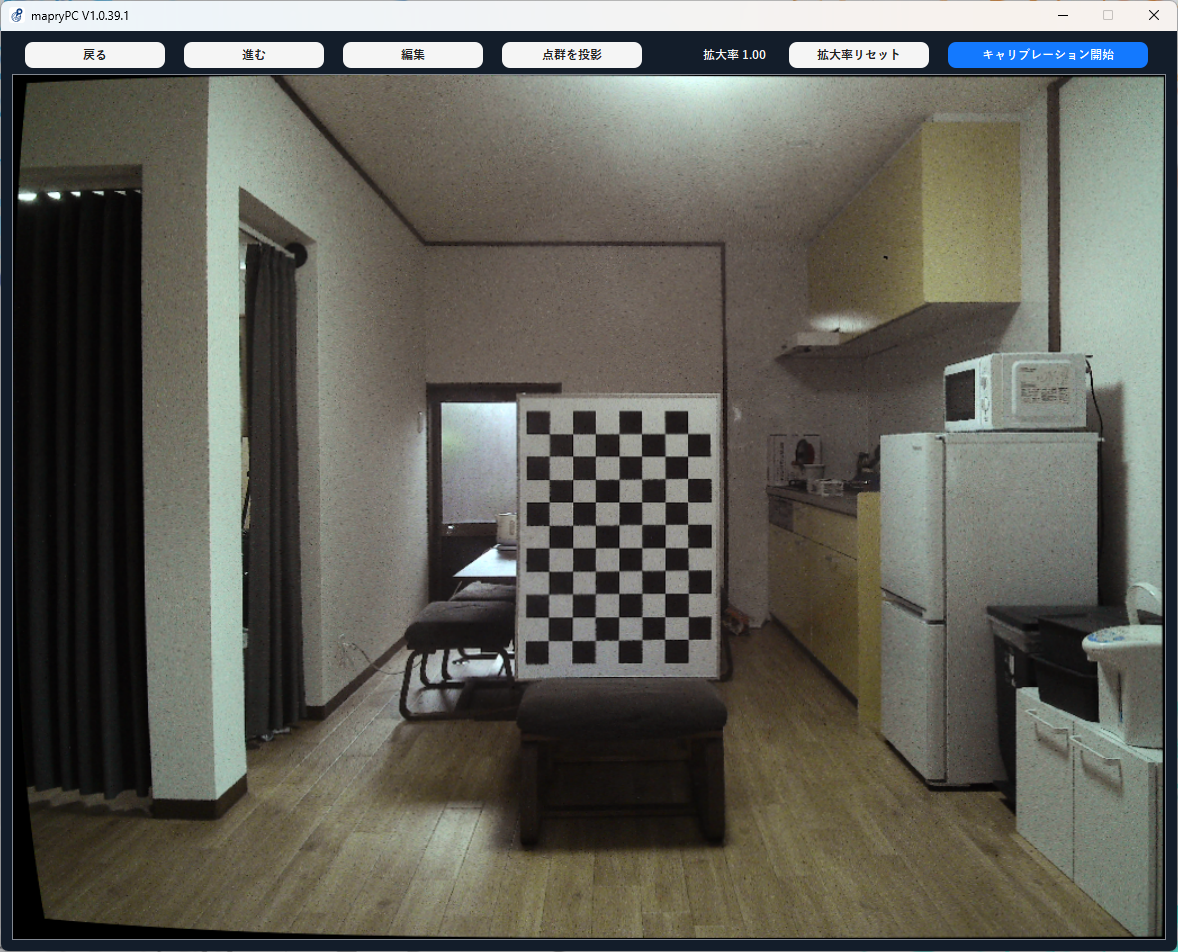
- 固定色付けのモードで取得したLA01のデータフォルダを選択してください。
「フォルダーを選択」ボタンで読み込み処理が開始します。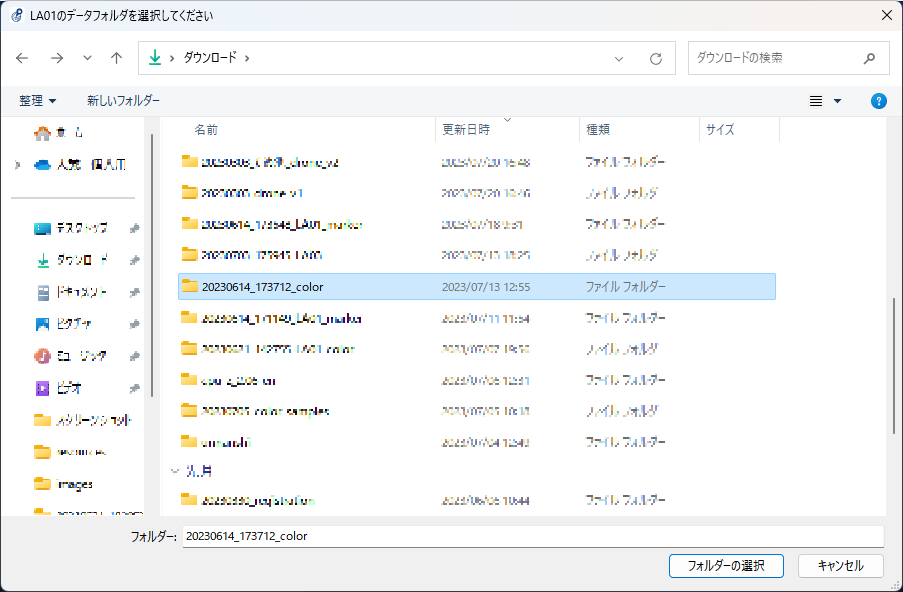
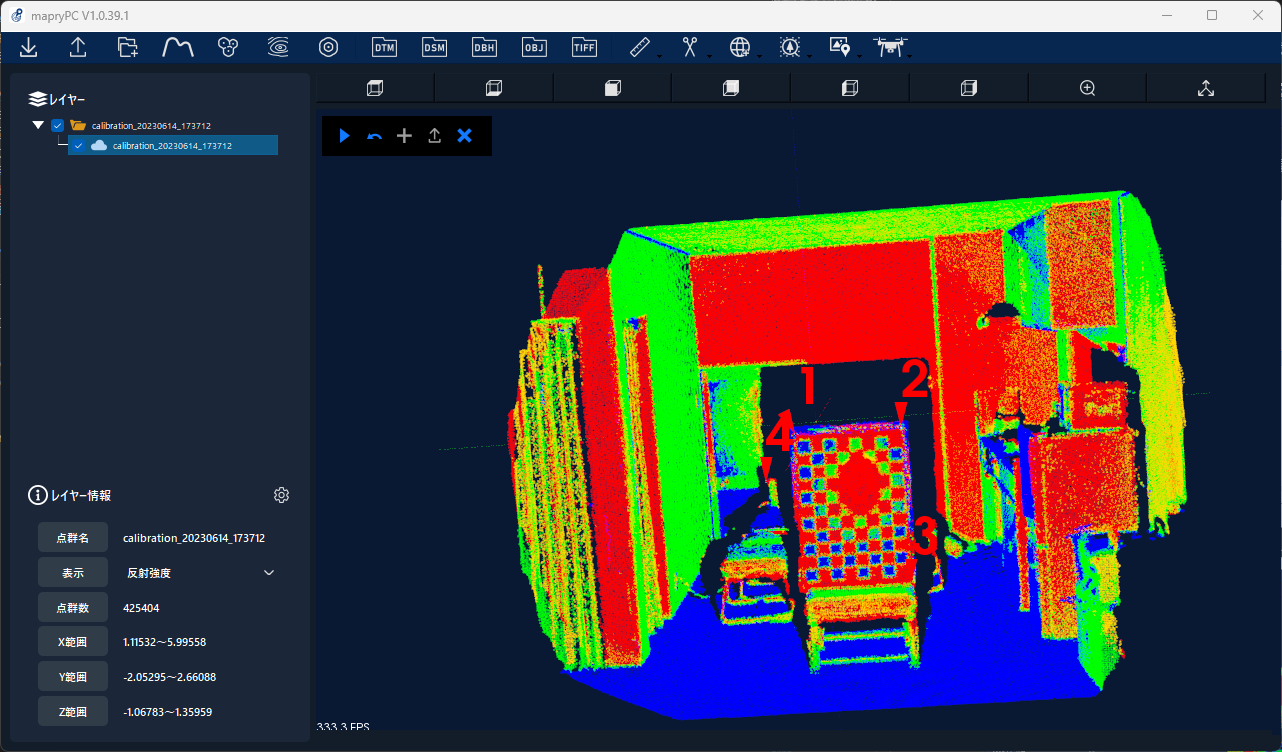
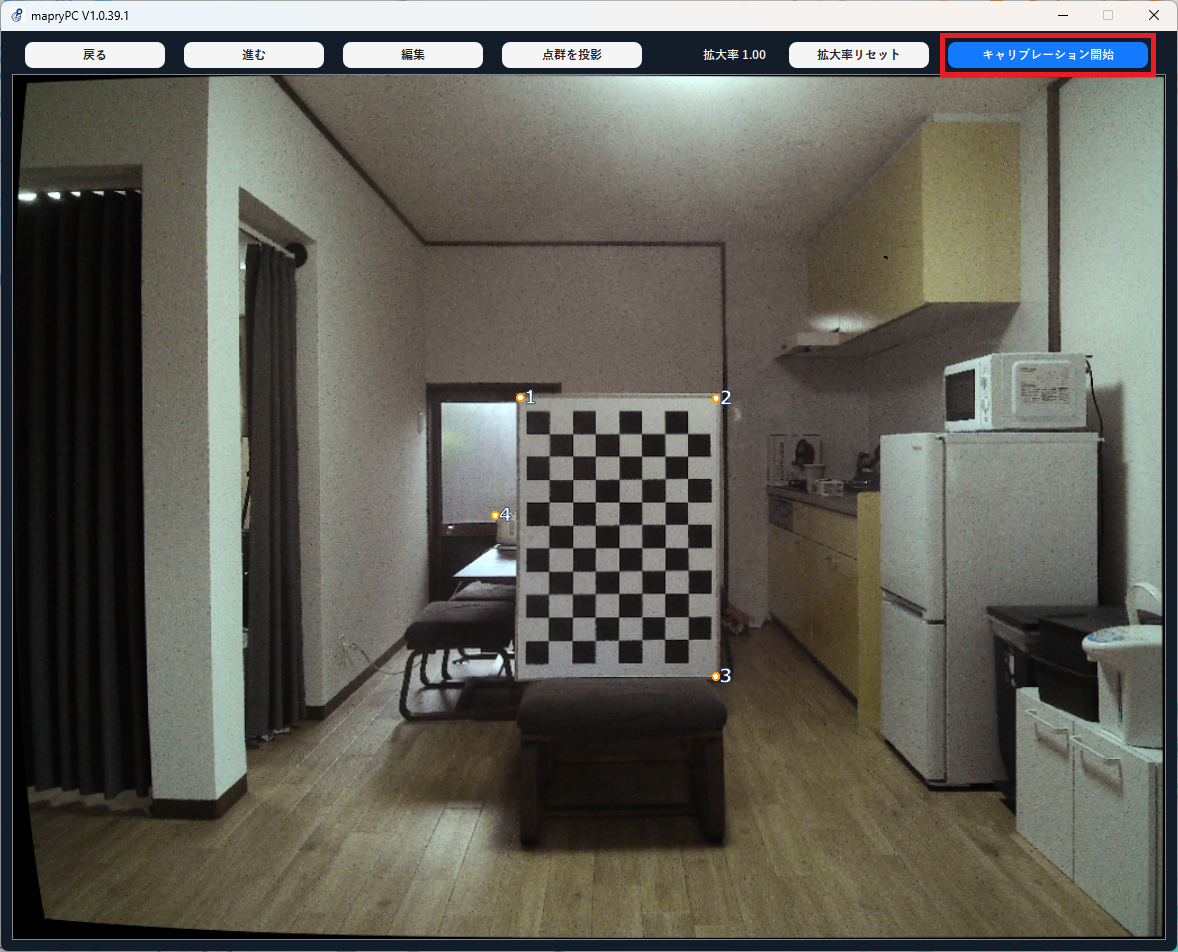
- 点群と画像がぞれぞれ表示されます。右クリックで特徴点を4点ずつ選択してください。
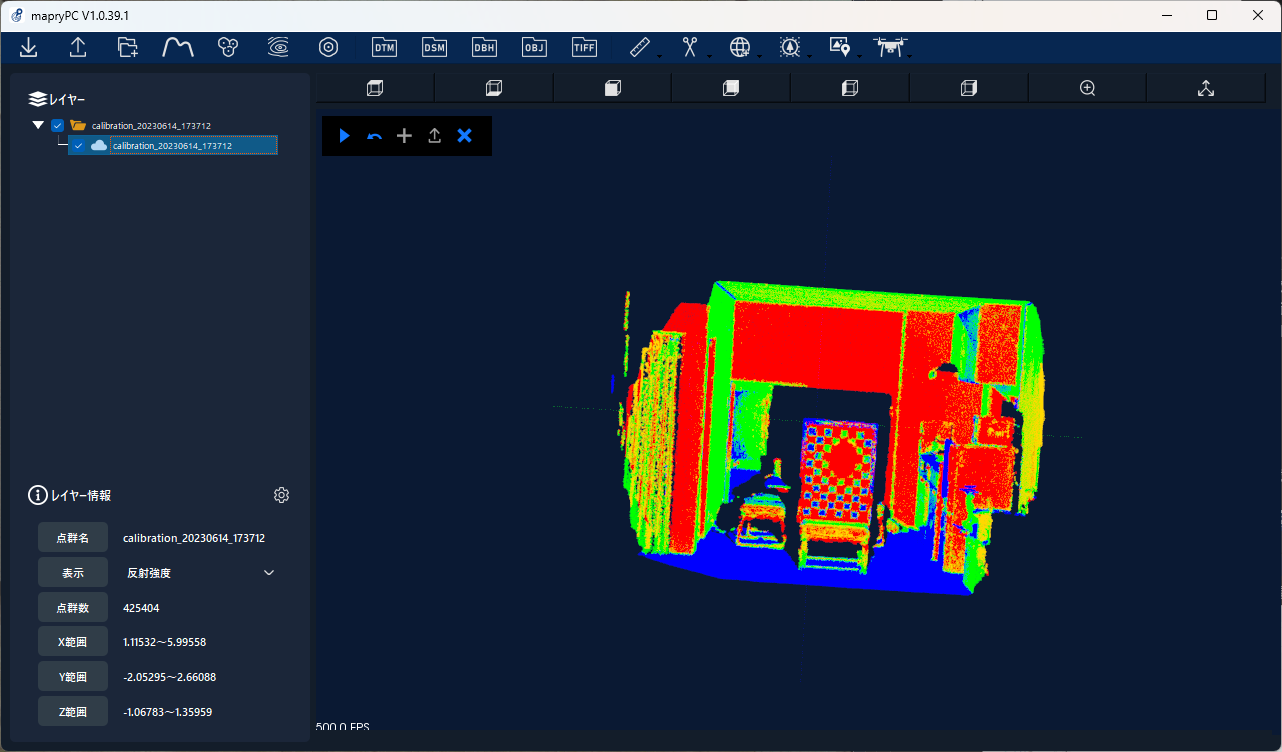
- 特徴点の選択後、「キャリブレーション開始」ボタンで処理が開始します。
- キャリブレーション処理後、補正したカメラパラメータをインポートしたデータフォルダに保存します。
また、補正したカメラパラメータを用いて点群を色付けした結果をビューワーに表示します。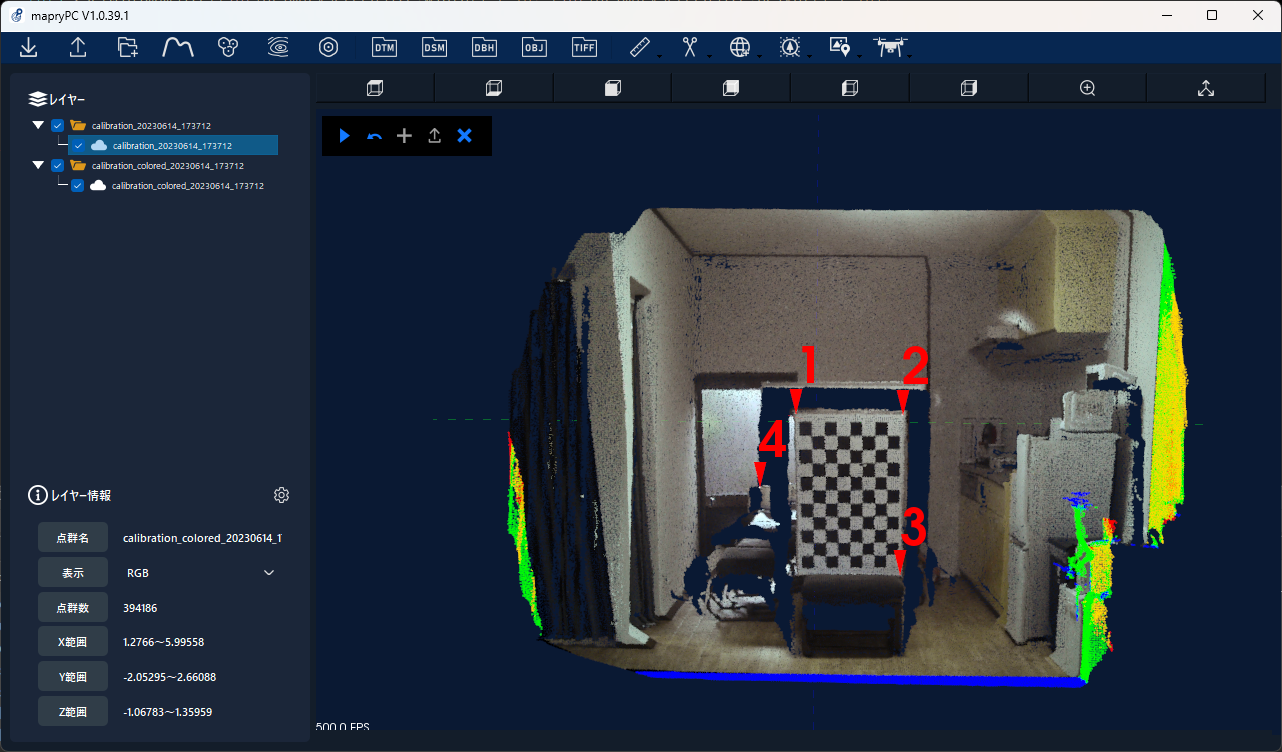
もし色付け結果にズレがある場合は、特徴点を選び直して再度キャリブレーションを実行してください。
- ボタンの説明

①戻る:直前の操作を取り消して元に戻します。
②進む:直前に取り消した操作をもう一度やり直します。
③編集:特徴点を後から移動する操作ができます。
④点群を投影:カメラパラメータを用いて点群を画像に投影します。
⑤拡大率:現在の拡大率を表示します。
⑥拡大率リセット:拡大率を1に戻します。また画像の位置も初期の状態に戻します。
4.14. 簡易計測 
距離・面積計測と体積計測を行えます。
4.14.1 距離・面積計測
1.簡易計測ボタンを押して、”距離・面積計測”を選択します。
2.”Shiftキー + 左クリックで、距離と面積を計測できます。”のダイアログのOKボタンを押してください。
3.簡易計測が使用できる状態になると、ビューワー左上に下記が画像のアイコンが追加されます。
【各種ボタン説明】
最後にクリックした点を削除します。
3点以上選択した状態でクリックするとポリゴンになります。
計測結果をレイヤーに追加します。
簡易計測を終了します。
4.Shiftキー + 左クリックを押して、2点以上選択すると、2点間の距離が表示されます。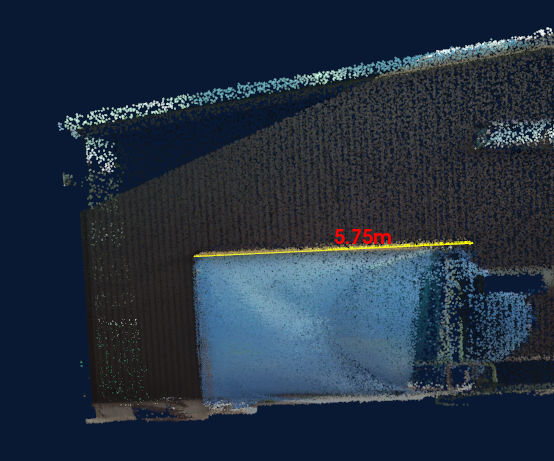
5.3点以上選択した状態でポリゴンボタンを押すと、ポリゴンになり、ポリゴン内の面積を計測出来ます。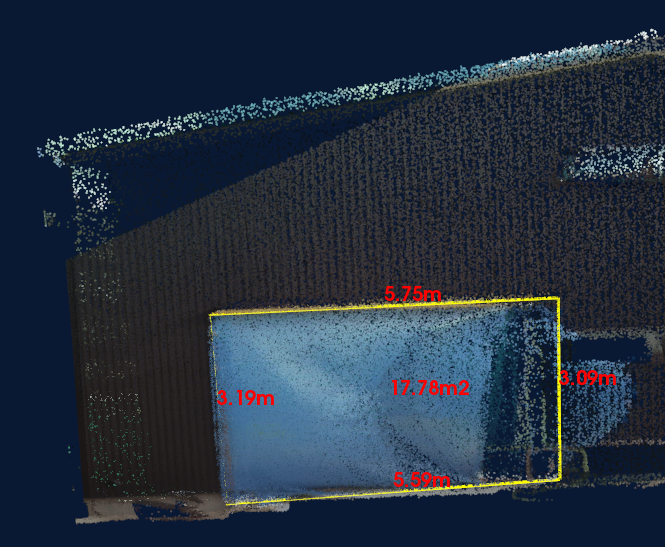
6.+マークのアイコンを押すと、計測結果をレイヤーに追加する事ができます。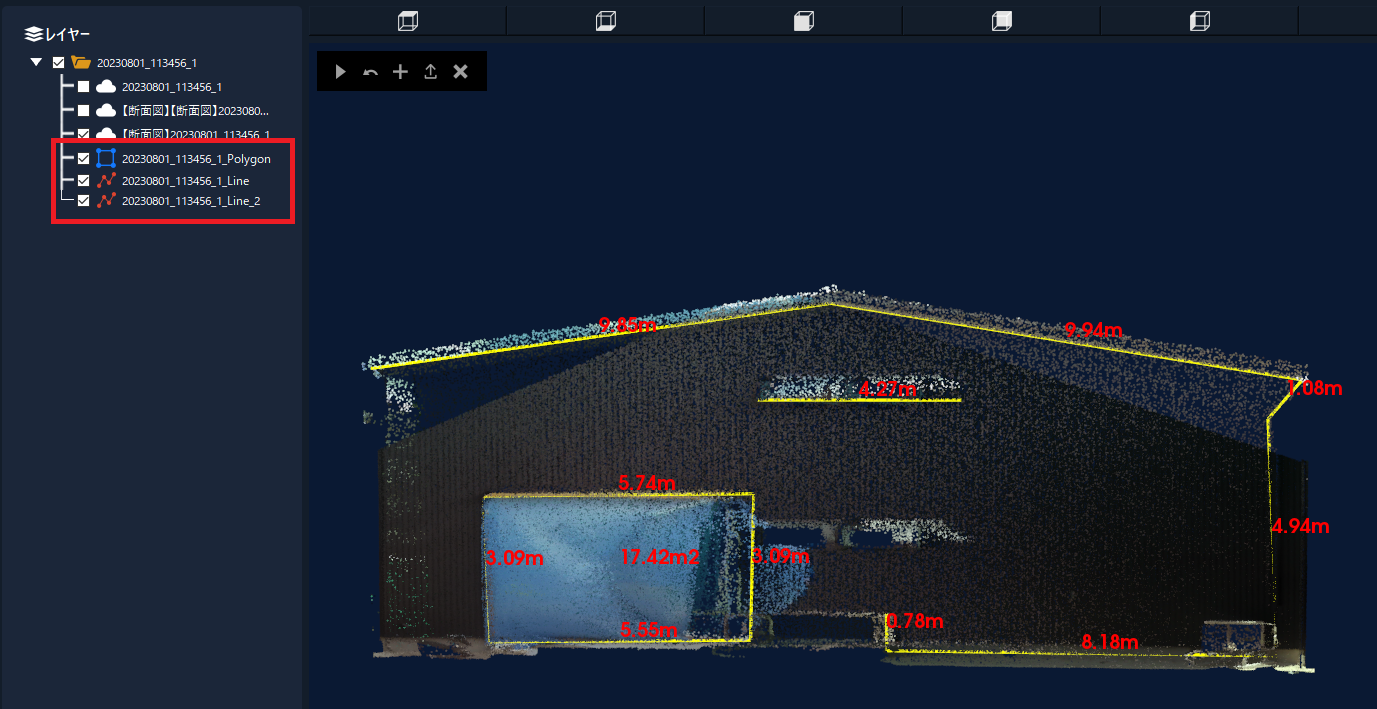
7.計測結果は、断面図または、平面図で出力することができます。 出力方法はコチラをご確認ください。
4.14.2 体積計測
1.簡易計測ボタンを押して、”体積計測”を選択します。
2.”Shiftキー + 左クリックで範囲選択後、スタートボタンで体積を計測できます。”のダイアログのOKボタンを押してください。
3.簡易計測が使用できる状態になると、ビューワー左上に下記が画像のアイコンが追加されます。
【各種ボタン説明】
計測結果の表示、非表示を切り替えられます。
体積計測を開始します。
最後に選択した点を削除します。
体積計測を終了します。
4.Shiftキー + 左クリックを押すと、選択箇所に青色の球が設置されます。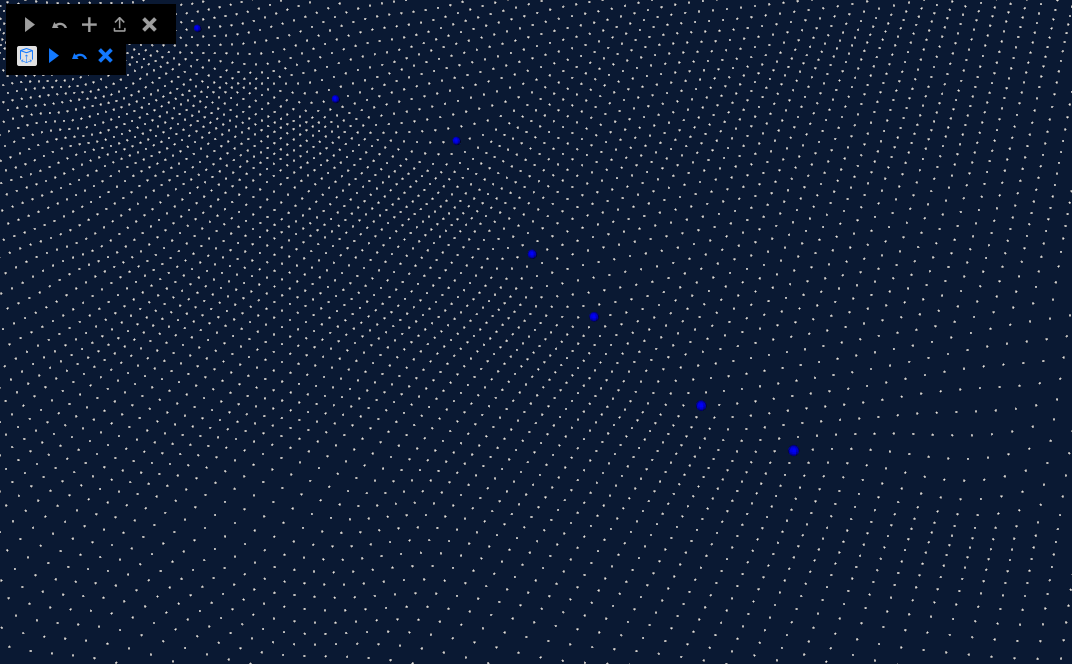
5.左上のスタートキーを押すと、選択した範囲の体積が表示されます。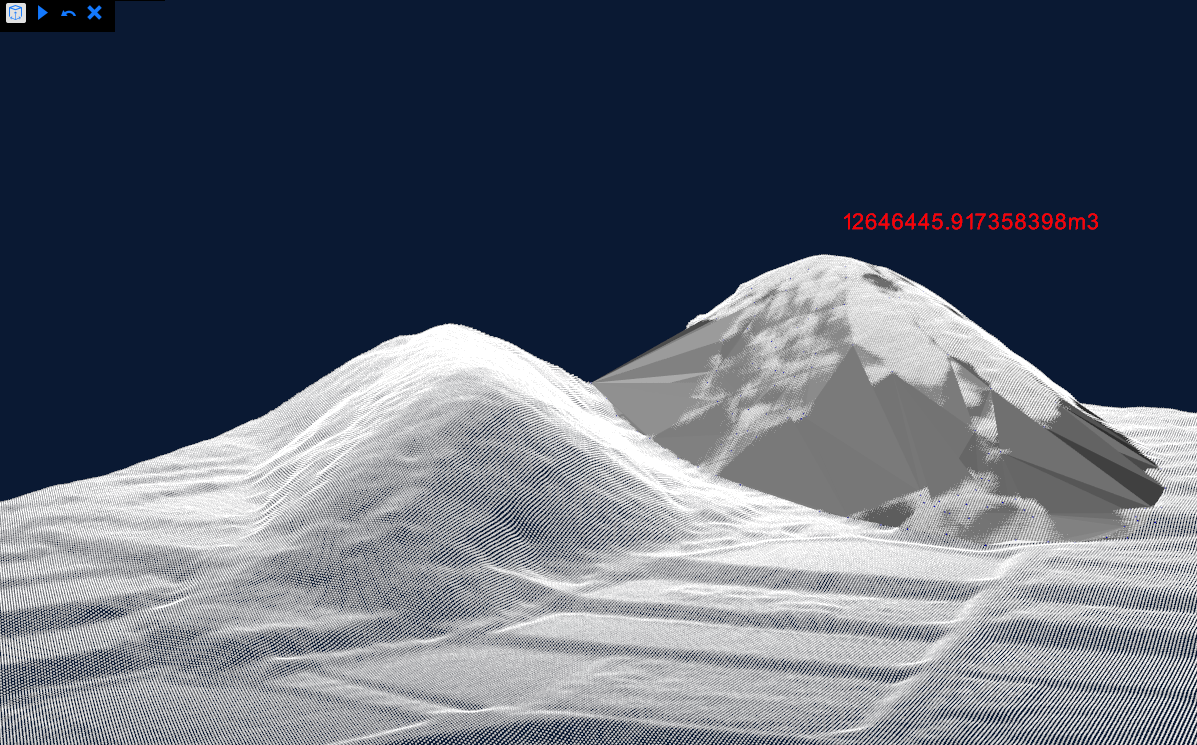
4.15. 点群カット 
選択した範囲で点群をカットします。
4.15.1 削除範囲を選択して点群をカットする
1.使用する点群をレイヤーから選択してください。
2.点群カットアイコンをクリックして、”削除範囲を選択する”を選択し、”内を削除”か”外を削除”を選択してください。
“内を削除”→選択した範囲の内側を削除します。
“外を削除”→選択した範囲の外側を削除します。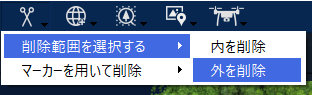
3.”右クリックで範囲を選択してください。選択範囲内が削除されます。”のダイアログのOKボタンを押してください。
4.右クリックで削除したい箇所を3点以上選択してください。選択範囲が、緑色と赤色のラインで囲まれます。
※範囲選択中は視点が固定されます。
5.左上のスタートボタンを押すと、処理が開始され、カットされた点群に更新されます。
〇注意点
・使用する点群ファイルの容量によっては、点群のカットに時間がかかることがあります。
・カット前の点群は残りません。
・処理範囲を選択する場合は、一度、点群カットを終了して、再度点群カットを起動して範囲を選択してください。
4.15.2 マーカーを使用して点群をカットする
マーカーを取得した順に繋げたポリゴンで点群をカットします。
1.使用する点群をレイヤーから選択してください。
2.マーカーがインポートされていることを確認してください。
3.点群カットアイコンをクリックして、”削除範囲を選択する”を選択し、”内を削除”か”外を削除”を選択してください。
“内を削除”→選択した範囲の内側を削除します。
“外を削除”→選択した範囲の外側を削除します。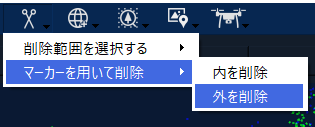
4.処理が開始され、カットされた点群に更新されます。
〇注意点
・現在の視点から、全マーカーを順番に繋いだ範囲で点群をカットします。
・使用する点群ファイルの容量によっては、点群のカットに時間がかかることがあります。
・カット前の点群は残りません。
4.16. 座標変換 
4.16.1 平行移動
点群を平行移動します。
4.16.2.1 変換元の座標をクリックして選択する
1.使用する点群をレイヤーから選択してください。
2.マーカーがインポートされていることを確認してください。
3.座標変換アイコンをクリックして、平行移動→投影座標系を用いて変換を選択→変換元の座標をクリックして選択を選択してください。。![]()
4.”座標変換用点選択中。右クリックで、平行移動に使用する1点を選択してください。”ダイアログのOKボタンを押してください。
5.平行移動の起点となるポイントを、ビューワー上から右クリックで選択してください。点が決まったら、ビューワー左上のスタートボタンを押してください。
6.座標変換ダイアログが立ち上がりますので、移動先の座標を入力し、”点群を変換する”ボタンを押してください。
7.ロード後に、変換された点群が追加されます。
4.16.2.2 変換元の座標を手入力して選択
1.使用する点群をレイヤーから選択してください。
2.マーカーがインポートされていることを確認してください。
3.座標変換アイコンをクリックして、平行移動→投影座標系を用いて変換を選択→変換元の座標をクリックして選択を選択してください。![]()
4.座標変換ダイアログが立ち上がりますので、赤枠内の変換前の座標と、変換後の座標を入力し、”点群を変換する”ボタンを押してください。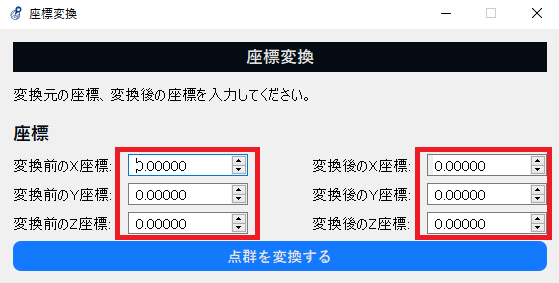
5.ロード後に、変換された点群が追加されます。
4.16.2 ヘルマート変換
LA01で撮影された点群をヘルマート変換します。
固定撮影されたデータに関しては、固定撮影時のヘルマート変換方法をご覧ください。
移動撮影されたデータに関しては、移動撮影時のヘルマート変換方法をご覧ください。
4.16.2.1 固定撮影時のヘルマート変換の場合
1.使用する点群をレイヤーから選択してください。
2.マーカーがインポートされていることを確認してください。
3.座標変換アイコンをクリックして、ヘルマート変換を選択してください。![]()
4.”右クリックで変換に使用する2点を選択してください”ダイアログのOKボタンを押してください。
5.予めRTK等で座標を取得している場所を右クリックを押してビューワー上で2点選択し、左上のスタートボタンを押してください。
6.設定画面が立ち上がるので、2点の変換後の座標を下記画像の赤枠にうちこみ、”点群を変換する”を押してください。
7.ロード画面後に、変換された点群が追加されます。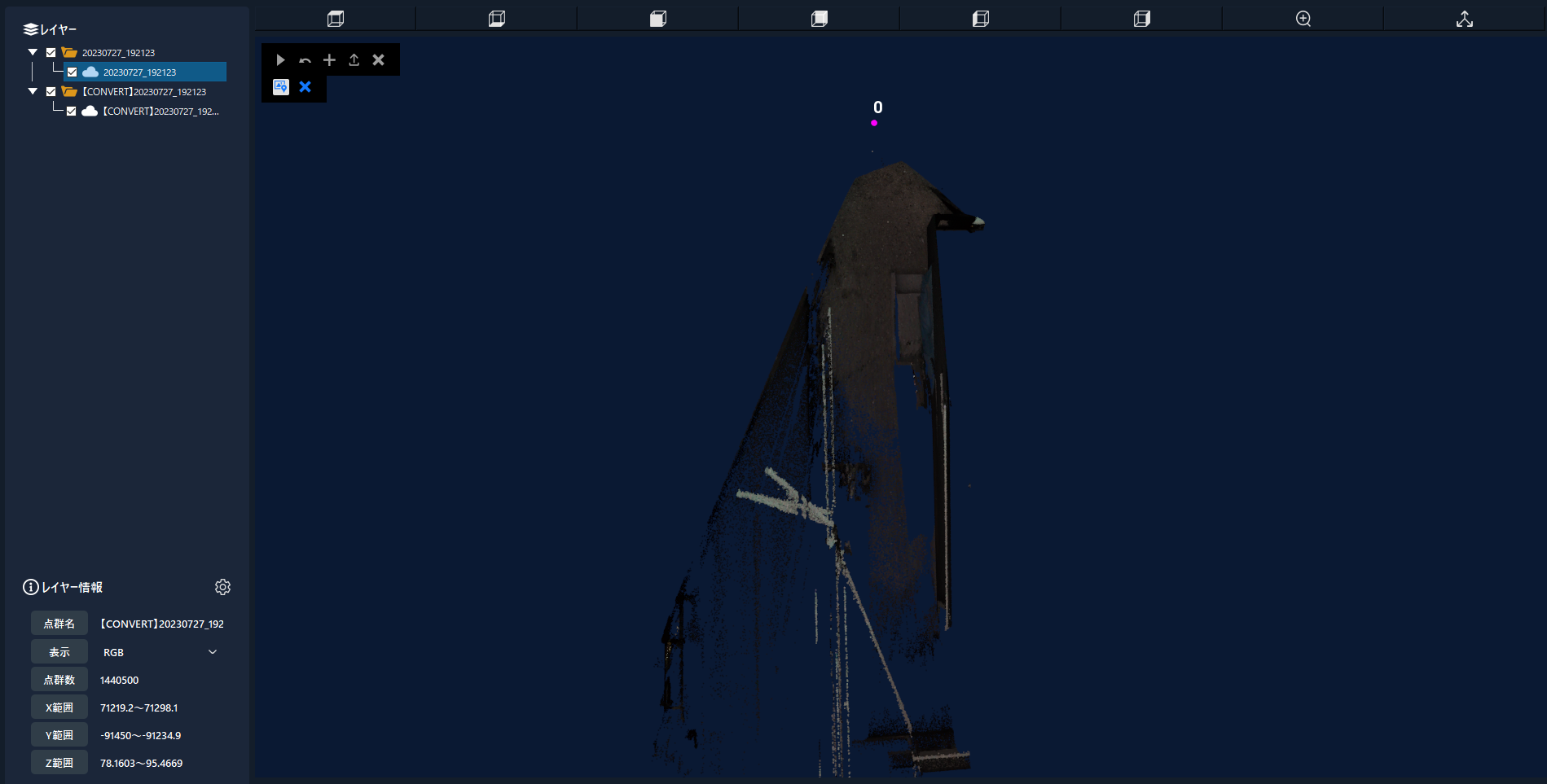
4.16.2.2 移動撮影時のヘルマート変換の場合
1.使用する点群をレイヤーから選択してください。
2.マーカーがインポートされていることを確認してください。
3.座標変換アイコンをクリックして、ヘルマート変換を選択してください。![]()
4.ロード画面の後、新たにヘルマート変換された点群が追加されます。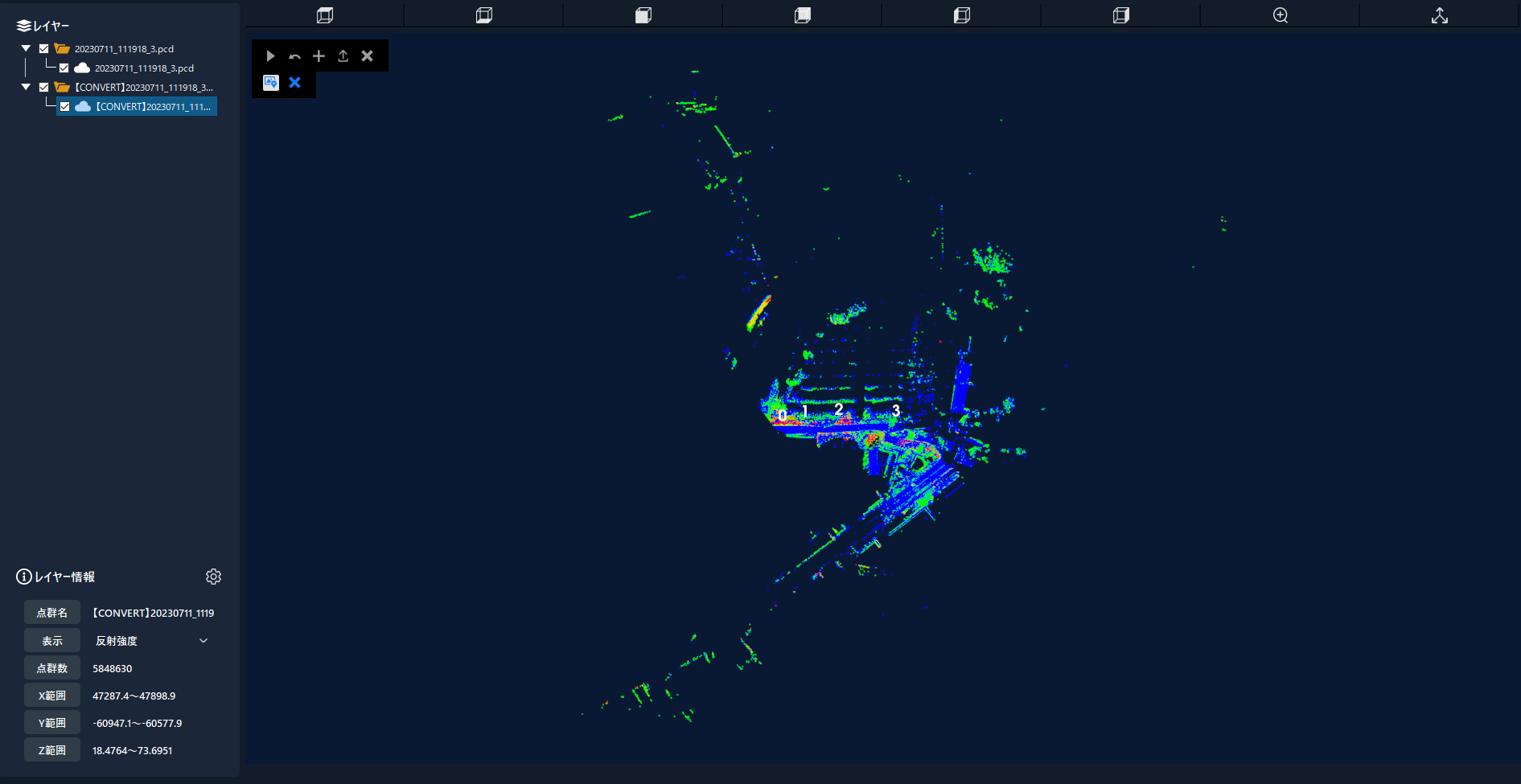
4.16.3 アフィン変換
LA01で撮影された点群をアフィン変換します。
固定撮影されたデータに関しては、固定撮影時のアフィン変換方法をご覧ください。
移動撮影されたデータに関しては、移動撮影時のアフィン変換方法をご覧ください。
4.16.3.1 固定撮影時のアフィン変換の場合
1.使用する点群をレイヤーから選択してください。
2.マーカーがインポートされていることを確認してください。
3.座標変換アイコンをクリックして、アフィン変換を選択してください。![]()
4.”右クリックで変換に使用する3点を選択してください”ダイアログのOKボタンを押してください。
5.予めRTK等で座標を取得している場所を右クリックを押してビューワー上で2点選択し、左上のスタートボタンを押してください。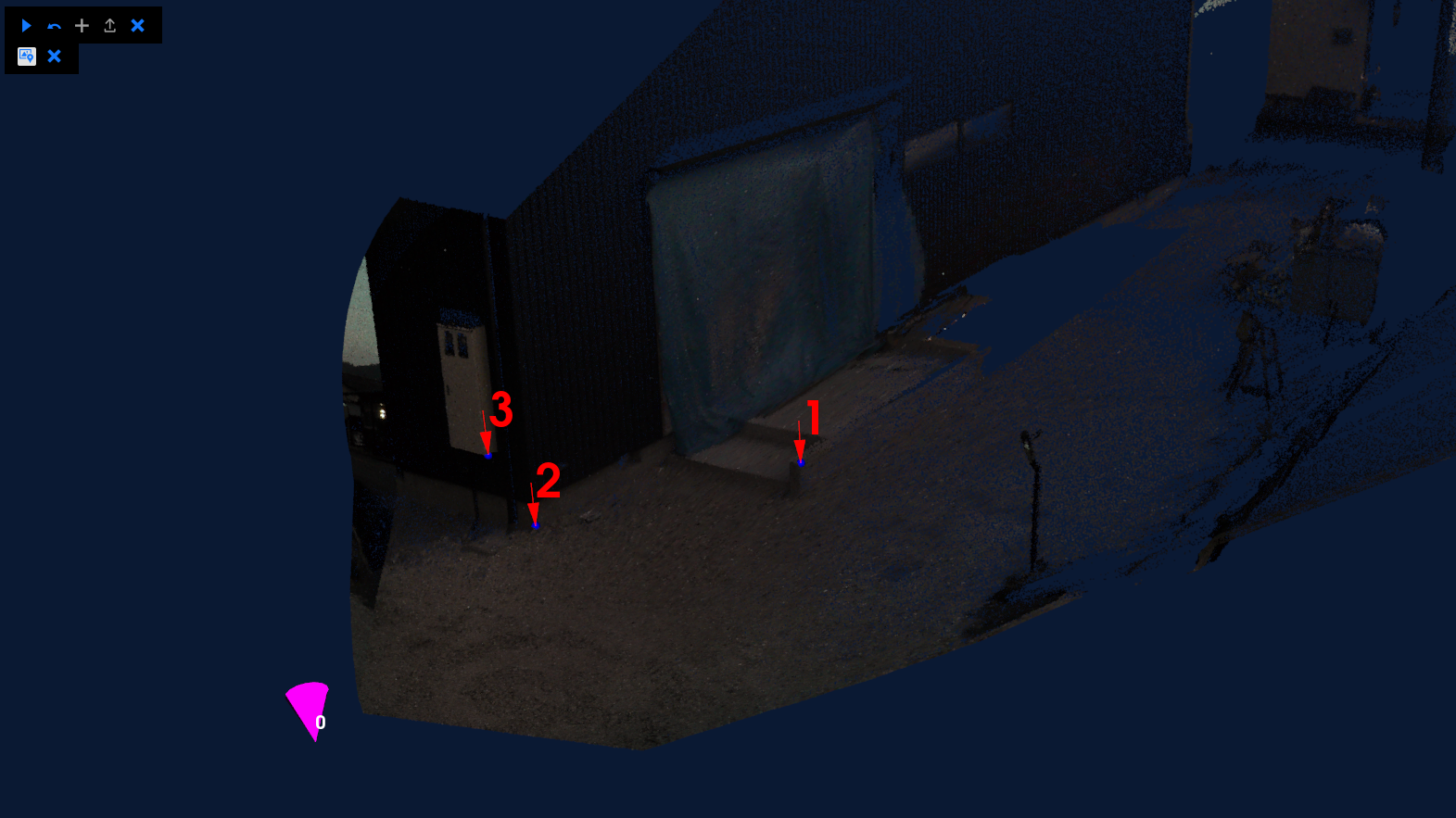
6.設定画面が立ち上がるので、3点の変換後の座標を下記画像の赤枠にうちこみ、”点群を変換する”を押してください。
7.ロード画面後に、変換された点群が追加されます。
4.16.3.2 移動撮影時のアフィン変換の場合
1.使用する点群をレイヤーから選択してください。
2.マーカーがインポートされていることを確認してください。
3.座標変換アイコンをクリックして、アフィン変換を選択してください。![]()
4.ロード画面の後、新たにヘルマート変換された点群が追加されます。
〇注意点
マーカーの位置や、変換後の座標によっては、大きくカタチの崩れた点群が出力される場合があります。
4.17. 立木検出 
LA01、LA03で撮影した点群を使用して、立木検出を行います。
〇注意点
点群の容量や、範囲次第で、処理時間が長くなることがあります。
4.17.1 立木検出方法
4.17.1.1 クリックした範囲で立木検出する場合
1.使用する点群をレイヤーから選択してください。
2.立木検出アイコンをクリックして、”範囲を選択して立木検出”を選択してください。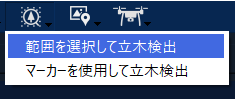
3.処理範囲選択方法ダイアログの、”クリックで計測”を選択し、OKボタンを押してください。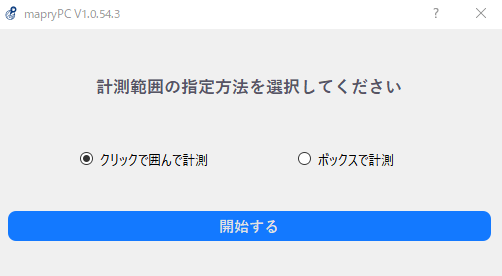
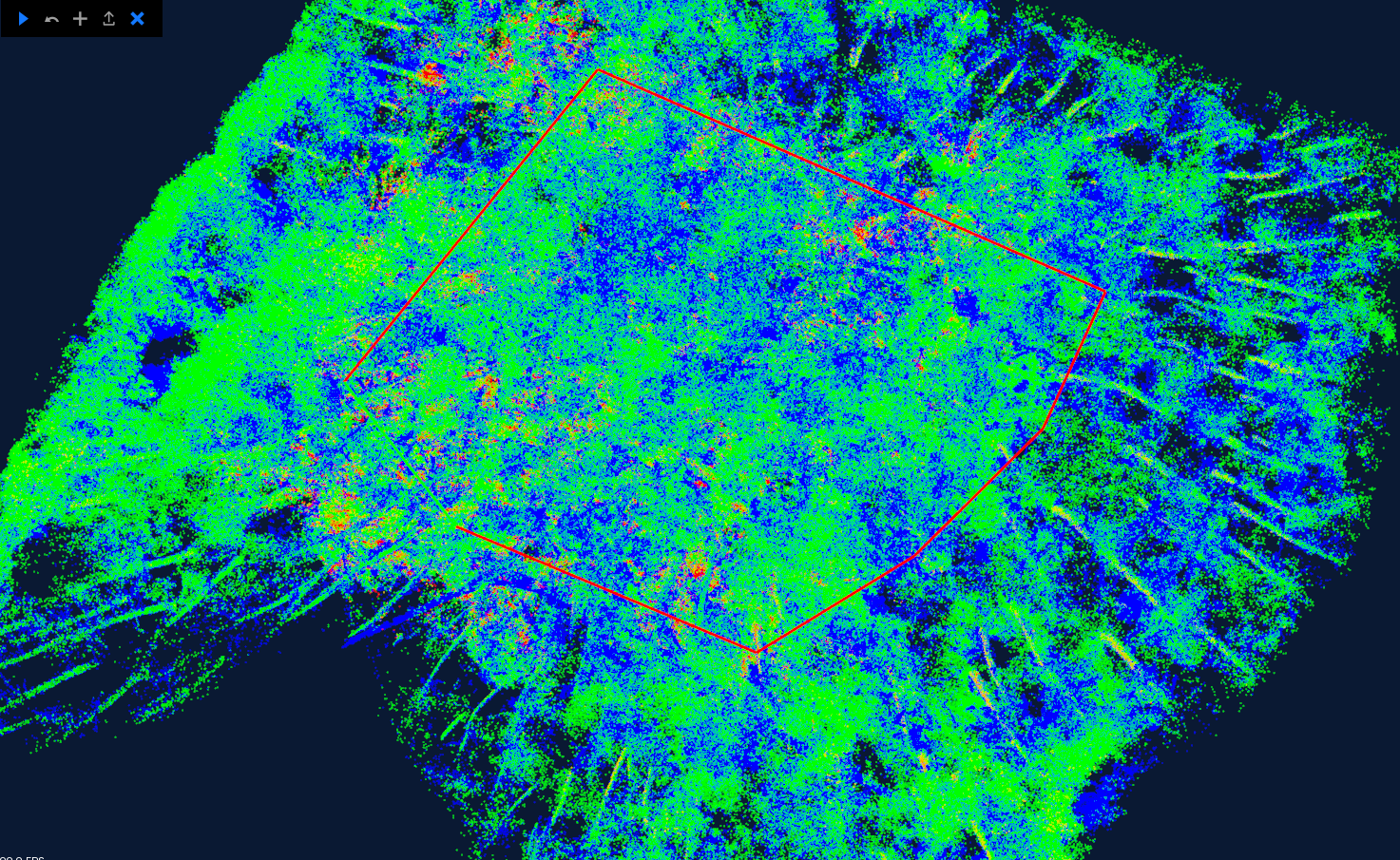
4.右クリックで3点以上選択すると、選択した点を繋いだ多角形がビューワー上に表示されます。
多角形の範囲内が検出範囲として問題無い場合は、ビューワー左上のスタートボタン押すのスタートボタンを押してください。
5.立木検出設定項画面を入力してください。
立木検出設定入力後に、”検出を開始する”ボタンをクリックすると、立木検出が開始されます。
立木検出設定画についてはこちらをご覧ください。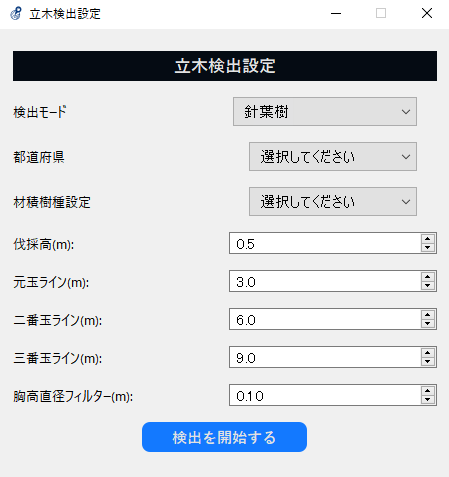
4.17.1.2 選択範囲の長さを指定して立木検出する場合
1.使用する点群をレイヤーから選択してください。
2.立木検出アイコンをクリックして、”範囲を選択して立木検出”を選択してください。
3.処理範囲選択方法ダイアログの、”ボックスで計測”を選択し、①ボックス縦幅(m)、②ボックス横幅(m)を入力してください。
指定した縦幅、横幅が、範囲選択するポリゴンの大きさになります。
縦幅、横幅の入力が完了したら、OKボタンを押してください。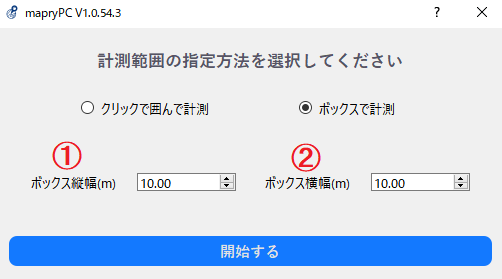
4.ビューワー上でShiftキーを押しながら、マウスを動かすことで選択範囲を移動。
aボタンを押しながらマウスを移動させれると、ポリゴンが回転します。
範囲が決定後に、ビューワー左上のスタートボタン押すと範囲が確定され、立木検出設定画面が表示されます。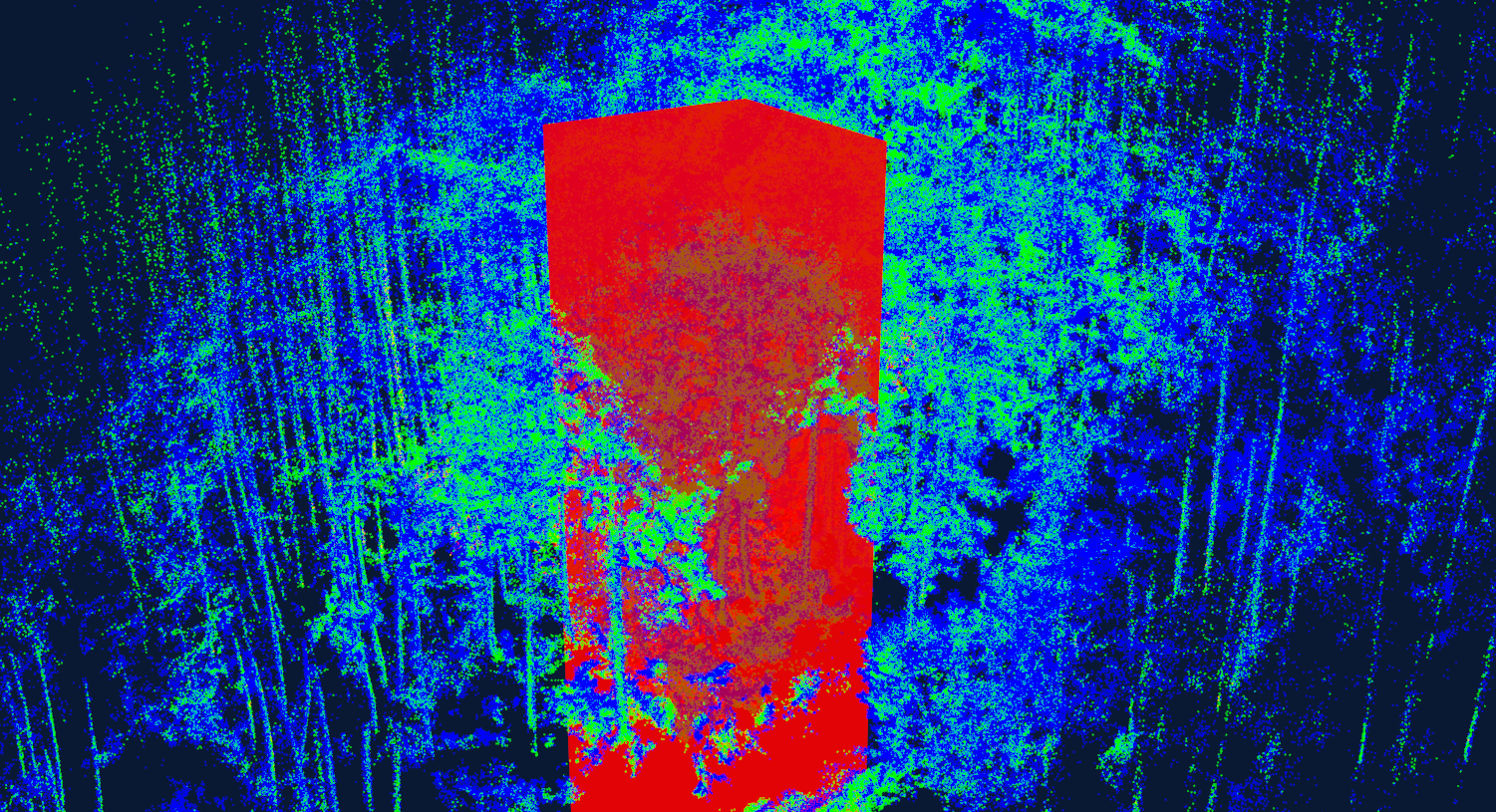
5.立木検出設定画面が表示されますので、立木検出設定入力後に、”検出を開始する”ボタンをクリックすると、立木検出が開始されます。立木検出設定画についてはこちらをご覧ください。
4.17.1.3 ルートから指定の範囲を計測する場合
1.使用する点群をレイヤーから選択してください。
2.ルートがインポートされているか確認してください。
3.立木検出アイコンをクリックして、”範囲を選択して立木検出”を選択してください。
4.処理範囲選択方法ダイアログの、”経路を中心とした幅で計測”を選択し、①経路から半径(m)を入力してください。
ルートからの指定した幅の範囲で立木検出にを行います。
幅の入力が完了したら、OKボタンを押してください。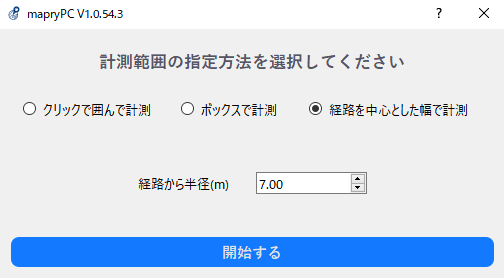
5.立木検出設定項画面を入力してください。
立木検出設定入力後に、”検出を開始する”ボタンをクリックすると、立木検出が開始されます。
立木検出設定画についてはこちらをご覧ください。
4.17.1.4 マーカーの範囲で立木検出する場合
1.使用する点群をレイヤーから選択してください。
2.マーカーがインポートされていることを確認してください。
3.立木検出アイコンをクリックして、”マーカーを使用して立木検出”を選択してください。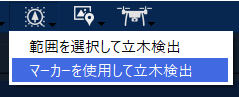
4.立木検出設定画面が表示されますので、立木検出設定入力後に、”検出を開始する”ボタンをクリックすると、立木検出が開始されます。立木検出設定画についてはこちらをご覧ください。
4.17.1.5 立木検出設定画面について
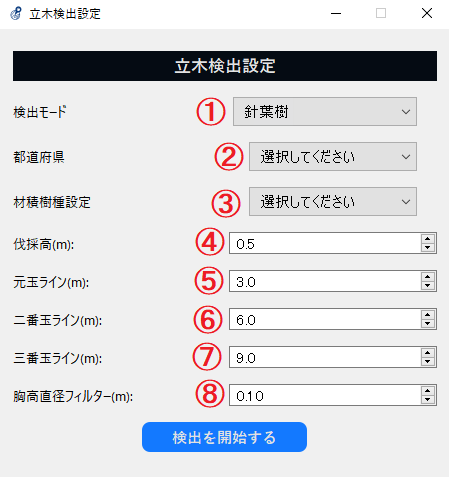
①検出モード
→針葉樹
→針葉樹と広葉樹(β版)
②都道府県選択 解析後の材積に影響します。
③樹種選択 解析後の材積に影響します。解析後に個別に変更できます。
④伐採高(m) 伐採高として計測される高さです。
⑤元玉ライン(m) 元玉として計測される高さです。
⑥二番玉ライン(m) 二番玉として計測される高さです。
⑦三番玉ライン(m) 三番玉として計測される高さです。
⑧胸高直径フィルター(m) 指定した胸高直径以下の立木は検出されなくなります。
4.17.2 立木検出結果画面
立木検出が終了すると、立木を検出した場所には、ビューワー上に円柱が表示され、結果一覧がビューワー下にテーブルで表示されます。
4.17.2.1 立木検出結果画面説明
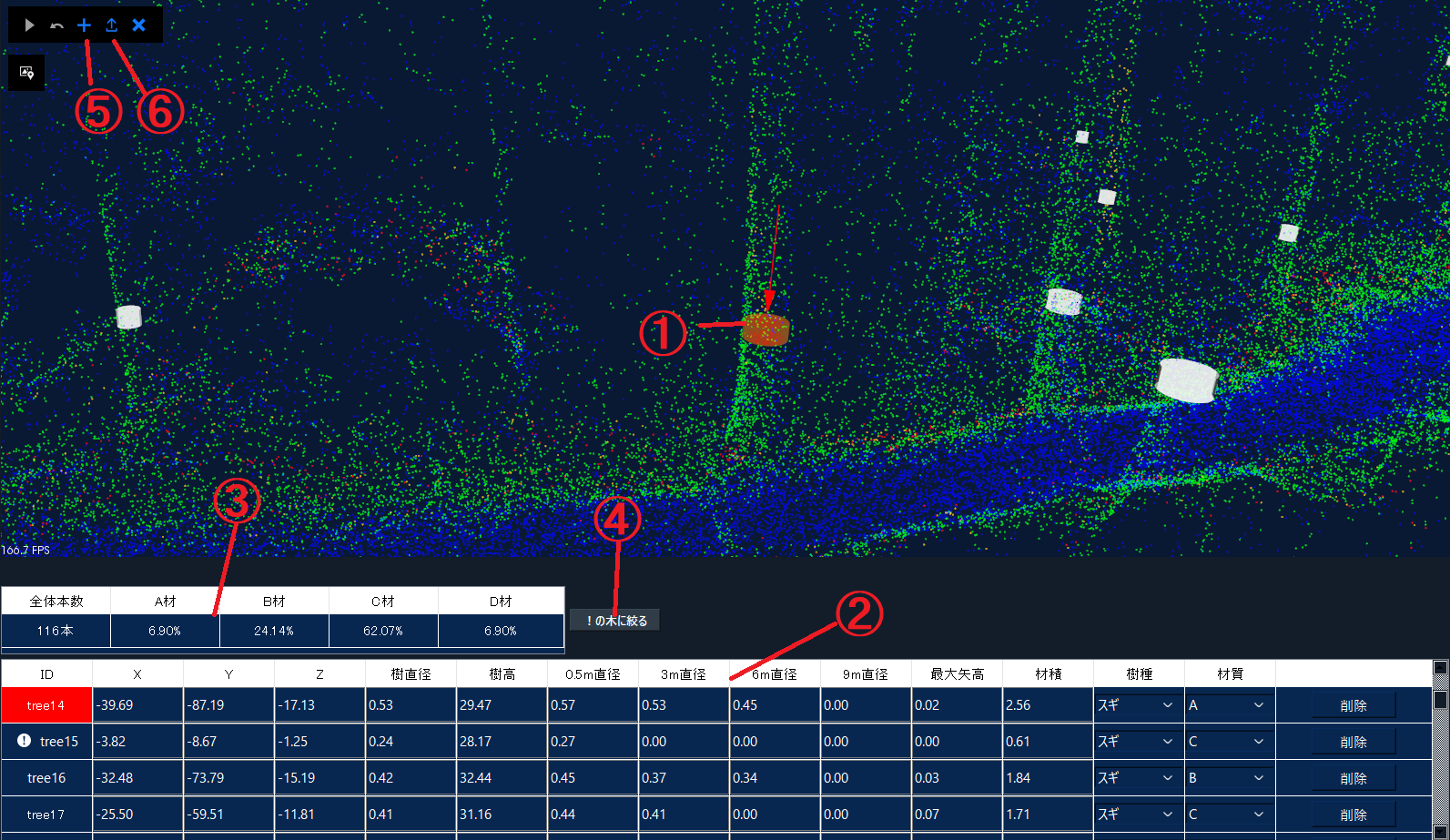
①立木検出された場所に、円柱が表示されます。円柱を右クリックすることで赤色になり、検出結果テーブルが該当のデータに移動します。
②立木検出結果の一覧です。
③検出した本数と材質の割合です。
④!マーク(検出の怪しい立木)で表示された木のみに絞り込めます。
⑤検出漏れした木を追加できます。詳しい方法は、立木検出結果追加方法をご覧ください。
⑥検出結果をShapeファイルで出力します。詳しい方法は、立木検出結果をShapeファイルで出力する方法をご覧ください
4.17.2.2 立木検出結果編集方法
テーブル内のセルの値をスクロールまたは、値をうちこむことで検出結果を変更できます。以下、重要な列に関しての補足になります。
・X、Y、Z列は、検出した座標を示しています。この値を変更することでビューワー上の該当する円柱の座標が動き、検出箇所を調節出来ます。
・樹直径列は、検出した立木の胸高直径を示しています。この値を変更することでビューワー上の該当する円柱の直径も変わり、胸高直径を調節出来ます。
・削除ボタンを押し、”削除しますか”ダイアログに、はいを押すと、該当の行とビューワー上の円柱が削除されます。
4.17.2.3 立木検出結果追加方法
1.ビューワー左上のプラスボタンを押してください。
2.”追加したい場所を右クリックしてください”のダイアログのOKボタンを押してください。
3.追加予定の場所に赤点が表示され、右クリックを押してください。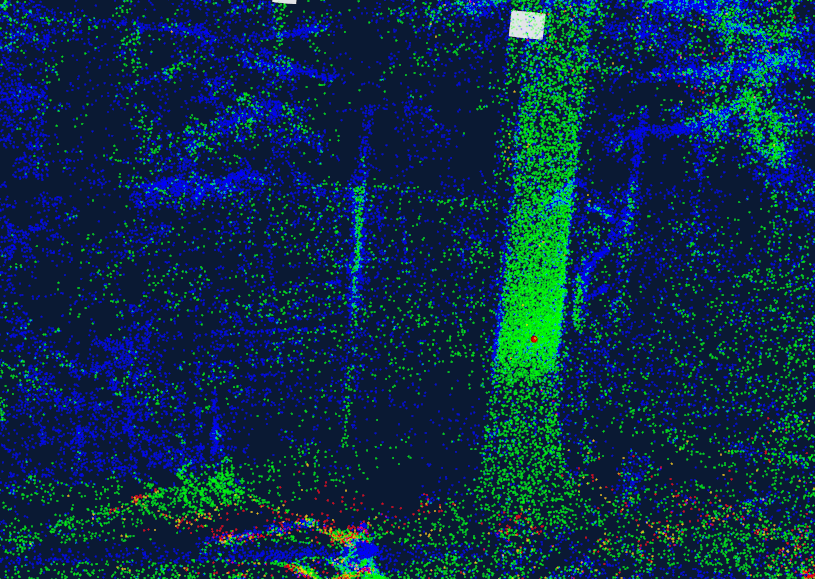
4.クリックした場所に、新しく円柱と結果テーブルに1行追加されます。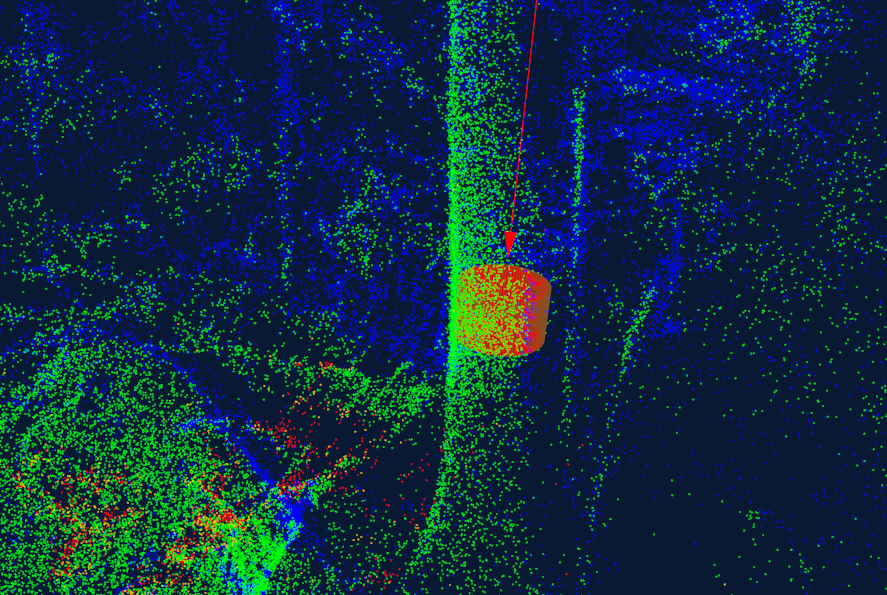
4.17.2.3 立木検出結果をShapeファイルで出力する方法
1.ビューワー左上のエクスポートボタンを押してください。
2.Shapeファイル出力設定ウィンドウの、①のボタンを押して出力ファイルパスを指定(zip)、②の座標系を選択して、開始ボタンを押します。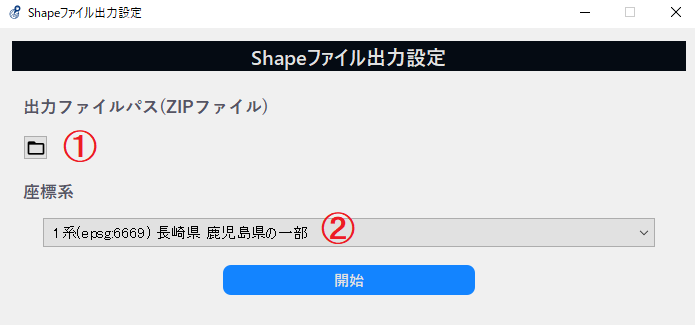
3.ロード画面の後、指定したパスに、zip形式でShapeファイルが保存されています。
4.18. レーザードローン 
レーザードローン(M1)で取得したのデータの読み込みまたはオルソ補正をします。
アイコンを選択、レーザードローンのデータディレクトリを選択で処理開始。
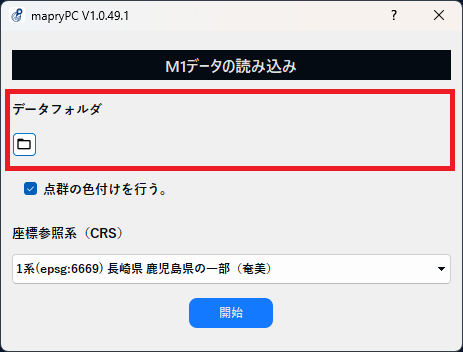
4.18.1 レーザードローン(M1)データの読み込み
ドローンアプリで取得した点群データと画像から、色付きの点群データを出力します。
-
ツールバーからレーザードローンのアイコンをクリックしてください。
次に、「M1データの読み込み」をクリックしてください。
- レーザードローンのデータフォルダを選択してください。
- 色付きの点群を作成する場合は、チェックをしてください。
※色付けの処理に読み込みに時間がかかる場合もあるため、必要がない場合はチェックを外してください。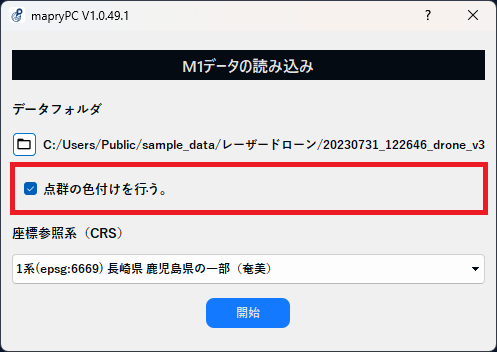
- 参照座標系(CRS)を選択してください。
座標系は日本測地系2011の1系(epsg:6669)~19系(epsg:6687)から選択できます。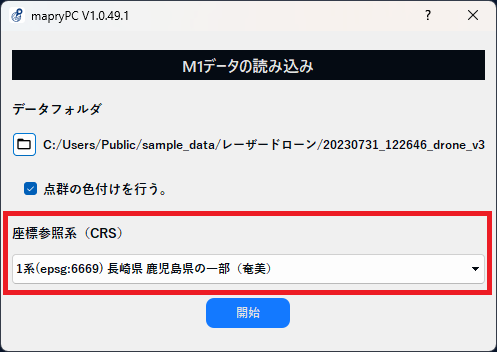
- 各項目の入力後、「開始」ボタンで点群の読み込みが開始します。
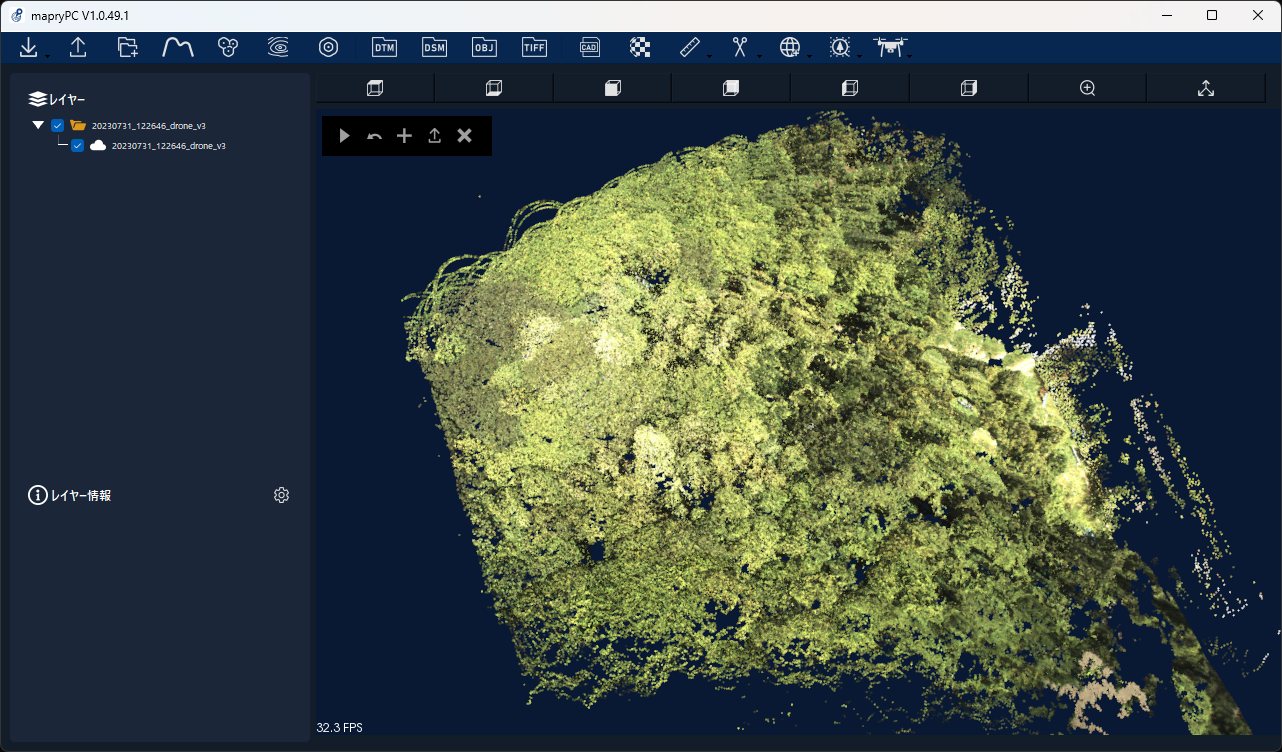
- 読み込みが完了すると、ビューワーに点群が表示されます。
4.18.2 レーザードローン(M1)データからオルソ画像の作成
-
ツールバーからドローン処理のアイコンをクリックしてください。
次に、「M1データからオルソ画像の作成」をクリックしてください。
- ドローンのデータフォルダを選択してください。
「フォルダーを選択」ボタンでオルソ補正が開始します。
- 処理が完了すると、オルソ画像が表示されます。
「オルソ画像を保存する」ボタンでTIFF形式(.tif)のオルソ画像を保存できます。